AprilTag Pose
The SDK can evaluate a flat AprilTag (not curved) to estimate pose, the combination of:
relative position from the camera lens center to the AprilTag center, and
orientation of the AprilTag in the camera’s reference frame
As described at the previous page FTC Reference Frame, position is expressed as (X, Y, Z). Orientation is expressed as rotation about (X, Y, Z), called Pitch, Roll and Yaw respectively.
The tag must be in the Library, which ensures that tag size (with units) is defined. Estimating pose requires knowing the tag size.
As demonstrated in the Sample OpModes, here are ways to retrieve the estimated pose values.
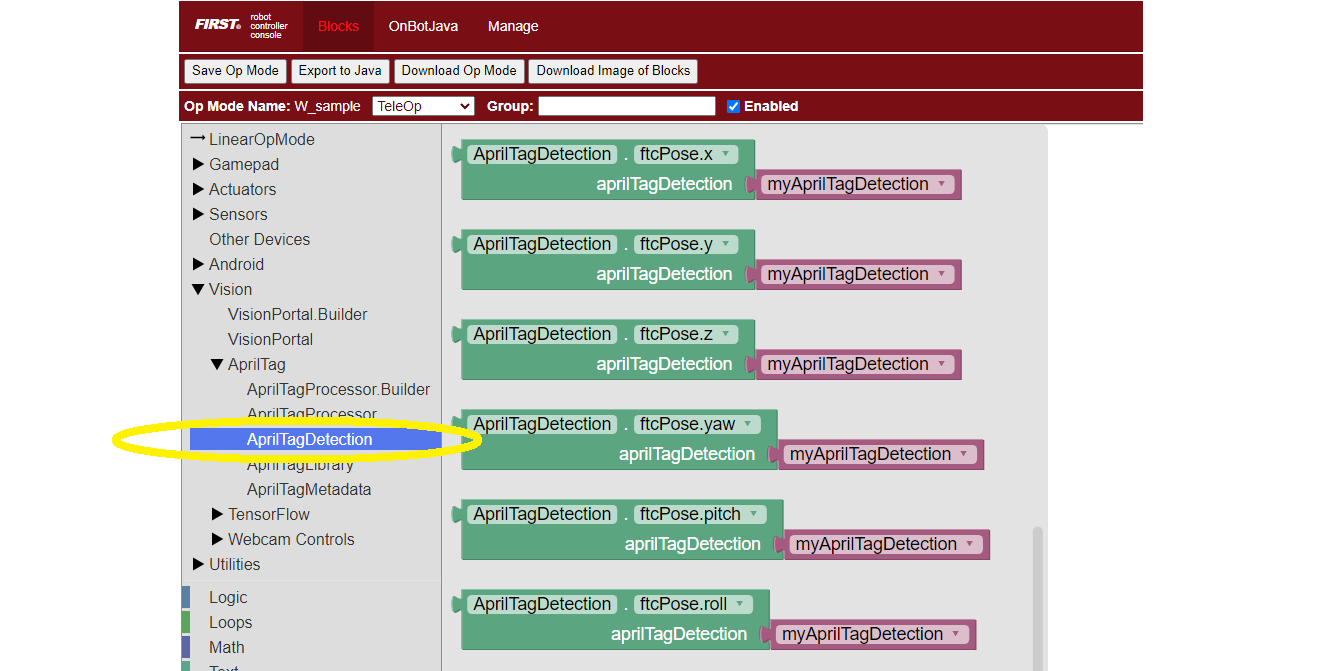
AprilTag Pose Blocks
Use each of these green Blocks to pass a Pose value to a Telemetry Block, or to a Variable:
Use these ftcPose fields for Telemetry, or assign to a Variable:
AprilTagDetection myAprilTagDetection;
double myTagPoseX = myAprilTagDetection.ftcPose.x;
double myTagPoseY = myAprilTagDetection.ftcPose.y;
double myTagPoseZ = myAprilTagDetection.ftcPose.z;
double myTagPosePitch = myAprilTagDetection.ftcPose.pitch;
double myTagPoseRoll = myAprilTagDetection.ftcPose.roll;
double myTagPoseYaw = myAprilTagDetection.ftcPose.yaw;
The SDK terms for Pitch, Roll and Yaw are not the same as the native AprilTag terms, due to the FTC reference frame.
Teams may find it helpful to use a calculated extension of the basic pose, with these terms:
Range, direct (point-to-point) distance to the tag center
Bearing, the angle the camera must turn (left/right) to point directly at the tag center
Elevation, the angle the camera must tilt (up/down) to point directly at the tag center
Here each green Block assigns its value to a Variable:
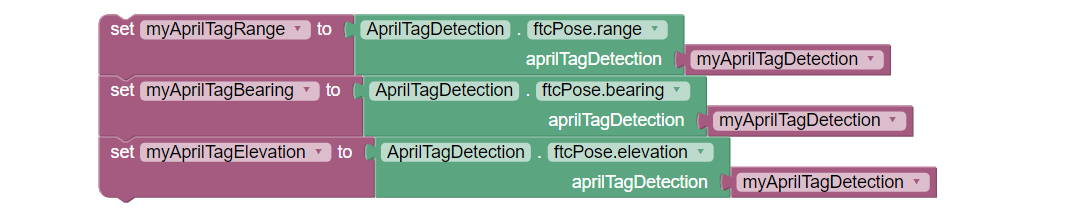
AprilTag Range, Bearing, Elevation Blocks
Use these ftcPose fields for Telemetry, or assign to a Variable:
AprilTagDetection myAprilTagDetection;
double myTagPoseRange = myAprilTagDetection.ftcPose.range;
double myTagPoseBearing = myAprilTagDetection.ftcPose.bearing;
double myTagPoseElevation = myAprilTagDetection.ftcPose.elevation;
Here, the terms do agree with the SDK method names, because they are calculated within the SDK from the native AprilTag pose values shown above (XYZ distances and PRY rotations).
As with tag ID code, pose data is usually retrieved inside a for() loop,
for immediate processing or stored for later use. See the Initialization
page for sample for() loop code.
Unlike tag ID code, a detected AprilTag might provide no pose data – if it was not placed into the Library by default or with the custom Builder pattern. Namely, the tag might lack Metadata including tag size, required for pose estimation.
To avoid logic errors, an OpMode can check the Metadata for a null condition before attempting to process pose data. This is illustrated in these Sample OpModes:
Blocks: ConceptAprilTag
Java: ConceptAprilTag.java
More discussion of AprilTag pose data is available here:
Understanding AprilTag Detection Values
Questions, comments and corrections to westsiderobotics@verizon.net