AprilTag Reference Frame
Introduction
Before discussing AprilTag pose (at the next page), the FTC axes or reference frame must be described. Pose data is based on the camera’s point of view, and requires a flat AprilTag.
Here are the axis designations in the new SDK:
Y axis points straight outward from the camera lens center
X axis points to the right (looking outward), perpendicular to the Y axis
Z axis points upward, perpendicular to Y and X
Note
Note 1: If the camera is upright and pointing “forward” on the robot, these axes are consistent with the Robot Coordinate System used for IMU navigation
Note
Note 2: these axes are different than the official AprilTag definitions, even from the camera’s frame of reference.
Translation Offset
If the AprilTag is detected within the camera’s field of view, the tag’s center is described in that reference frame as (X, Y, Z) position, also called displacement or translation.
This is illustrated with a camera preview image, called LiveView, from a Robot Controller device (Control Hub or RC phone).
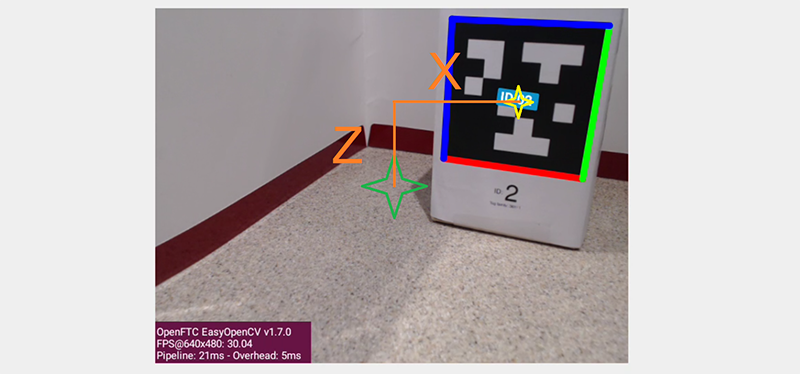
Image depicting LiveView offsets
Imagine a laser beam pointing straight outward from the center of the camera lens. Its 3-dimensional path appears (to the camera) as a single point, located at the green star. You can see that the center of the AprilTag (yellow star) is offset from that “laser beam”.
That translation offset can break down into three traditional components (X, Y and Z distances), along axes at 90 degrees to each other:
X distance (horizontal orange line) is from the center, to the right
Y distance (not shown) is from the lens center, outwards
Z distance (vertical orange line) is from the center, upwards
The SDK provides these distances in the real world, not just reporting how many pixels on the screen. The distance units are specified in each tag’s Metadata (default is inches).
Think of the Y distance as the length of the “laser beam”, when the tip of the horizontal orange line touches the yellow star on the tag.
If the tag is exactly in front of the camera, X and Z are zero, while Y represents the positive distance to the tag.
Rotation Offset
You can also see that the AprilTag’s flat face is not parallel to the plane of the camera. That rotation offset can break down into three angles about the X, Y and Z axes.
Any off-axis pointing or tilting of the AprilTag is reported by the SDK as rotation about axes X, Y or Z. Here are some examples:
If that tag is parallel to the camera but tilted, say, clockwise, this is expressed as positive angular rotation (Roll) about the Y axis.
If a tag appears to the left side of the camera’s view, this has an X-axis displacement or translation. It’s a negative translation, since X points to the right.
If that left-displaced tag is also angled, say, to face the camera, this is expressed as angular rotation about the vertical Z axis. It’s a positive Yaw angle, according to the right-hand rule: with the thumb pointing along the positive axis, the fingers curl in the direction of positive rotation.
If a detected tag is angled or pointing, say, slightly upward to the ceiling, this is expressed as rotation about X. Use the right-hand rule to confirm this would be a negative Pitch angle, since X points to the right. This example assumes the camera is pointing parallel to the ground/mat.