AprilTag Advanced Use
Overview
This page will offer tips for FIRST Tech Challenge teams seeking more info about specialized features of the new VisionPortal.
Optional Metadata
An AprilTag Library tag can store two optional Metadata fields (of these Blocks/Java types):
fieldPosition: tag location on the game field (VectorF)fieldOrientation: tag orientation on the game field (Quaternion)
The reference frame is the FIRST Tech Challenge Field Coordinate System, provided here:
Here is a simple graphic showing the FIRST Tech Challenge global axes that apply to every game, every season:
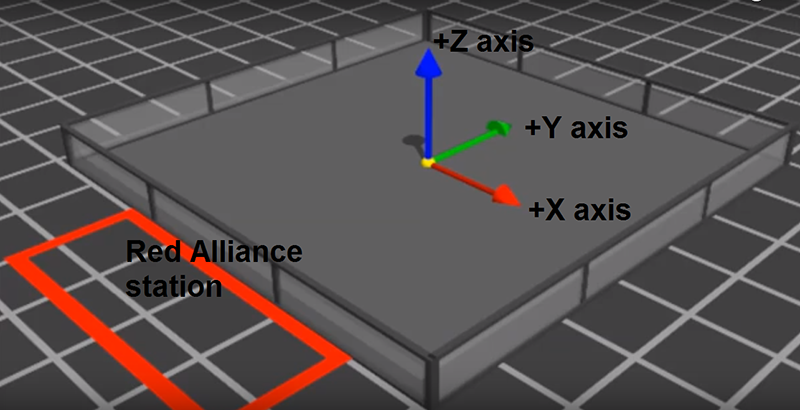
Image Credit: Phil Malone
With a tag’s field position and orientation specified in advance as Metadata, the tag’s pose data could be used by an advanced OpMode to calculate the robot’s position on the field. This conversion math, an exercise for the reader, can allow a robot to use the tag’s pose data in real-time to navigate to the desired location on the field.
Raw Pose Values
The frame of reference described at the AprilTag Reference Frame page is provided by default in the new 8.2 SDK.
Advanced teams may prefer to perform their own pose calculations, based on raw values from the AprilTag/EasyOpenCV pipeline.
Those raw values are available to Java and Blocks programmers. The Java version is shown here:
for (AprilTagDetection detection : aprilTag.getDetections()) {
Orientation rot = Orientation.getOrientation(detection.rawPose.R, AxesReference.INTRINSIC, AxesOrder.XYZ, AngleUnit.DEGREES);
// Original source data
double poseX = detection.rawPose.x;
double poseY = detection.rawPose.y;
double poseZ = detection.rawPose.z;
double poseAX = rot.firstAngle;
double poseAY = rot.secondAngle;
double poseAZ = rot.thirdAngle;
}
These raw values are converted by the SDK to the default interface, as follows:
if (detection.rawPose != null) {
detection.ftcPose = new AprilTagPoseFtc();
detection.ftcPose.x = detection.rawPose.x;
detection.ftcPose.y = detection.rawPose.z;
detection.ftcPose.z = -detection.rawPose.y;
Orientation rot = Orientation.getOrientation(detection.rawPose.R, AxesReference.INTRINSIC, AxesOrder.YXZ, outputUnitsAngle);
detection.ftcPose.yaw = -rot.firstAngle;
detection.ftcPose.roll = rot.thirdAngle;
detection.ftcPose.pitch = rot.secondAngle;
detection.ftcPose.range = Math.hypot(detection.ftcPose.x, detection.ftcPose.y);
detection.ftcPose.bearing = outputUnitsAngle.fromUnit(AngleUnit.RADIANS, Math.atan2(-detection.ftcPose.x, detection.ftcPose.y));
detection.ftcPose.elevation = outputUnitsAngle.fromUnit(AngleUnit.RADIANS, Math.atan2(detection.ftcPose.z, detection.ftcPose.y));
}
Further discussion is provided here:
Advanced CPU Management
This section continues from the VisionPortal CPU and Bandwidth page, which covered many basic tools for avoiding limits of CPU usage and USB bandwidth.
To evaluate multiple factors, changing at the same time, a customized Test OpMode can be very useful. This section provides an example that allows live gamepad control to:
toggle AprilTag Processor on and off
toggle TFOD Processor on and off
toggle LiveView on and off
toggle Streaming on and off
Other features of this Test OpMode include:
All controls are independent, to explore the combinations and their effect on frame rate (FPS).
The previews can be observed, and detections/recognitions can be monitored via annotations and Telemetry.
Frame rate is provided in LiveView and DS Telemetry.
The Telemetry functions include an alternate for getting all or only fresh detections/recognitions.
This Test OpMode can be downloaded for FTC Blocks or Java. The Blocks version is shown below; right-click to open in a new browser tab and zoom in.
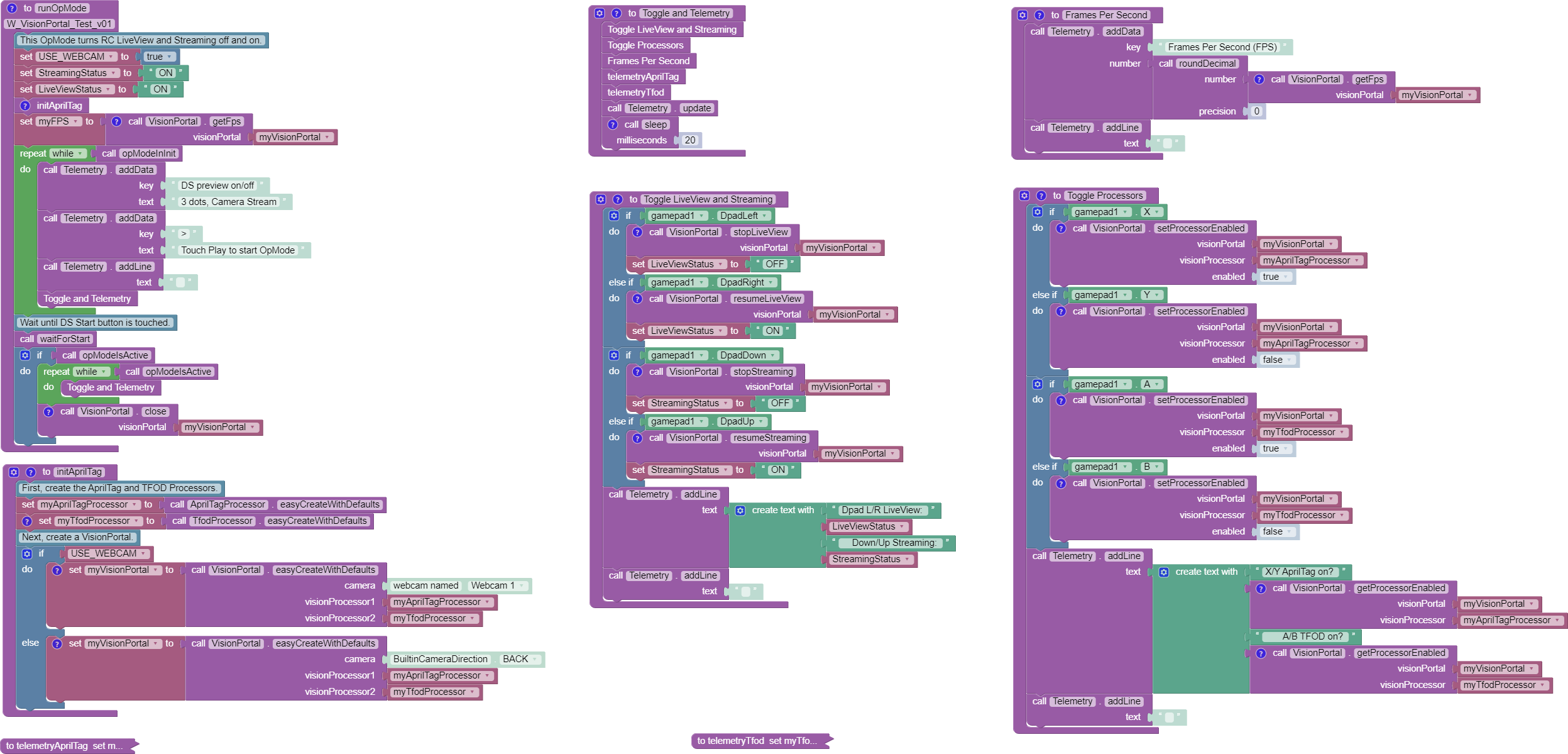
VisionPortal Example OpMode
The OpMode uses “Webcam 1”, or change USE_WEBCAM for a built-in RC phone
camera. For Control Hub, set up an HDMI monitor or scrcpy. Follow the DS gamepad button guide.
At that VisionPortal CPU and Bandwidth page, four tools mentioned were not discussed:
set decimation (down-sampling)
select a pose solver algorithm
get all or only fresh detections from the AprilTag Processor
get all or only fresh recognitions from the TFOD Processor
For now, these are left for interested Blocks and Java users to research and investigate. In time, more information may be posted at this page.
All of the above features are easily found in the relevant FTC Blocks toolbox, or palette, under the Vision category.
Java users should review the VisionPortal interface at the SDK Javadocs site. Click FRAMES for easy navigation.
Questions, comments and corrections to westsiderobotics@verizon.net