AprilTag Camera Calibration
To provide good pose estimates, each RC phone camera or webcam model requires calibration data, for each specific resolution.
“Without a camera calibration, the best you could achieve is being able to turn towards the target. Range information would be incorrect.” – FIRST Tech Challenge navigation expert @gearsincorg
The FIRST Tech Challenge SDK contains such data for a limited number of webcams and resolutions. Teams can generate their own data, called lens intrinsics.
Here’s one possible procedure, of several free choices available publicly.
Utility OpMode
First, create an OpMode from the Java Sample
UtilityCameraFrameCapture.java. Android Studio teams can find this
utility program in the External Samples folder.
FTC Blocks teams can duplicate this OpMode, requiring a custom myBlock
only for the method saveNextFrameRaw(). At some future time, this
Java method may become available as a regular Block, avoiding the need
for a myBlock. Learn more about myBlocks here:
This Utility OpMode helps calibrate a webcam or RC phone camera, needed for AprilTag pose estimation. It captures a camera frame (image) and stores it on the Robot Controller (Control Hub or RC phone), with each press of the gamepad button X (or Square).
To illustrate, the OpMode stores the first two captured images as:
VisionPortal-CameraFrameCapture-000000.pngVisionPortal-CameraFrameCapture-000001.png
This is done for each run of the OpMode. Teams should move each set of frames to its own folder (on a computer), to avoid overwriting the previous run’s results.
Mac OSX users may need special software for Android file transfer.
Next, read and follow the calibration instructions posted at ftc-docs. Other calibration programs are widely available online.
Existing Warnings
Running ConceptDoubleVision (or any AprilTag Sample OpModes) using a
built-in RC phone camera, gives the following error message on both
devices:
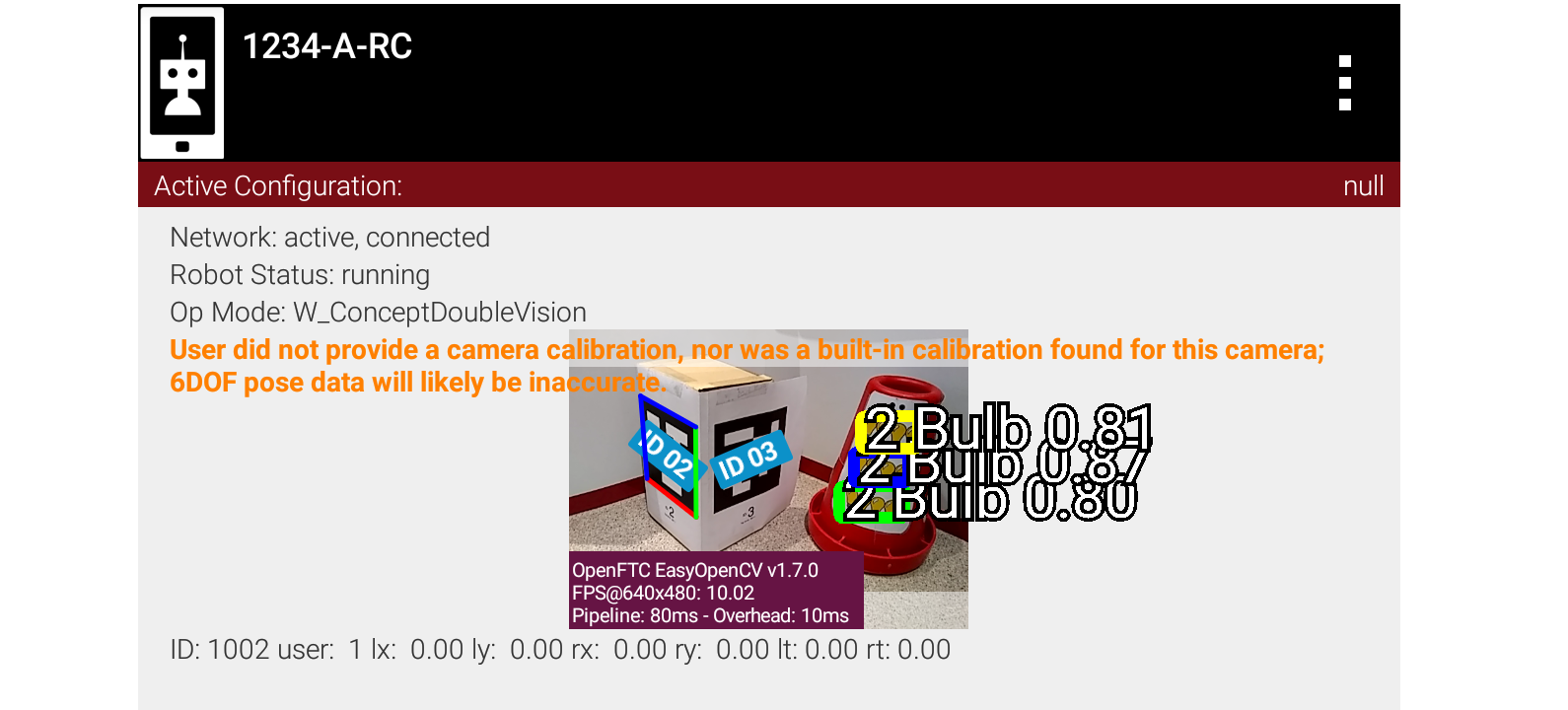
Warning of no camera calibration provided
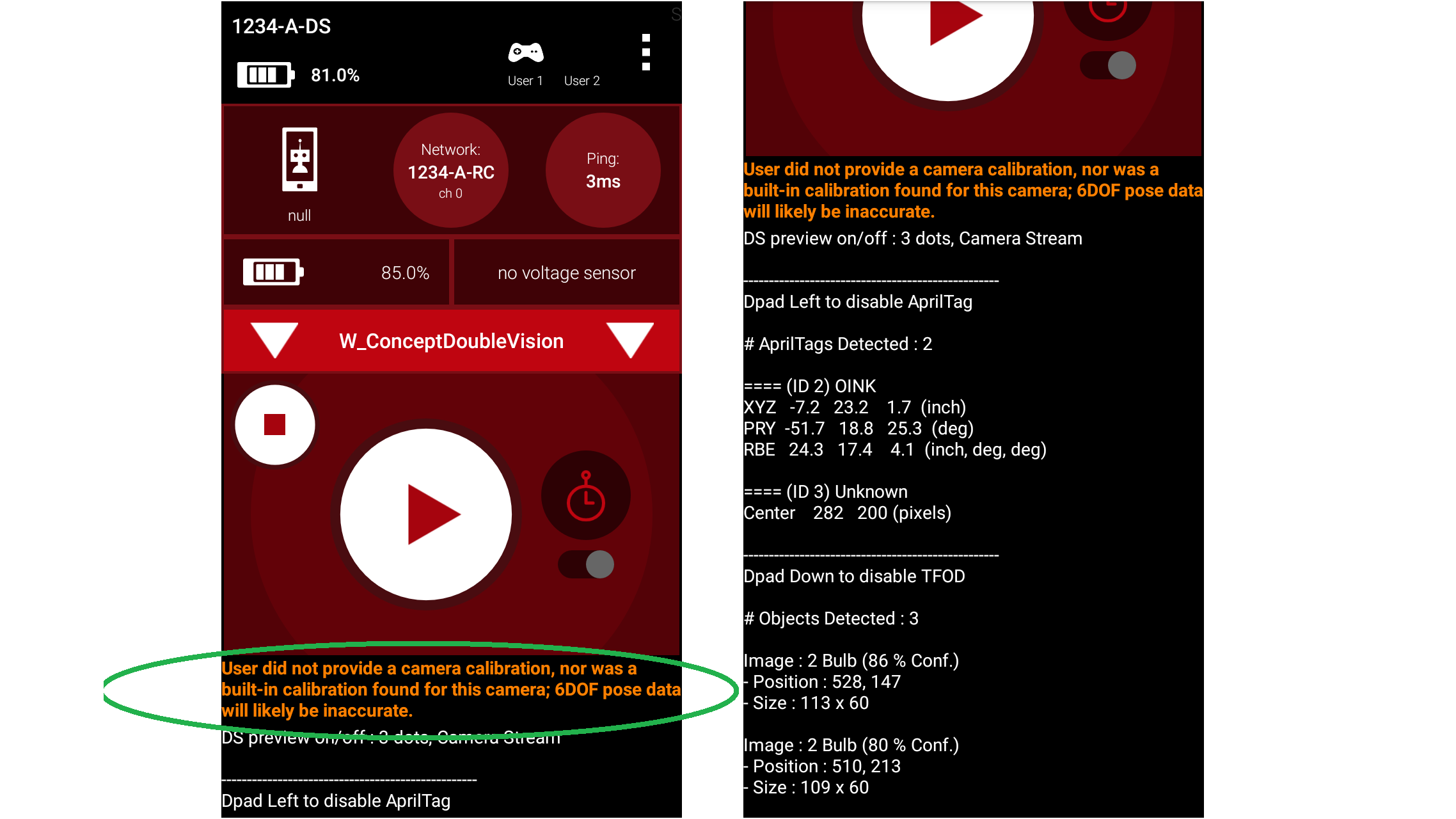
Right-hand image shows that the warning still allows detections.
The SDK gives a different warning that covers a special case, where the OpMode uses:
a camera model for which the SDK does have lens intrinsics, and
a user-specified resolution for which
the SDK does not have lens intrinsics, and
(b) the aspect ratio matches that of lens intrinsics that the SDK does have (for that camera model).
In such a case, the SDK scales the results in an attempt to estimate AprilTag pose.
For example, changing the Logitech C270 resolution from 640x480 to 800x600 (also 4:3 aspect ratio), gives this warning on the RC preview and the DS screen:
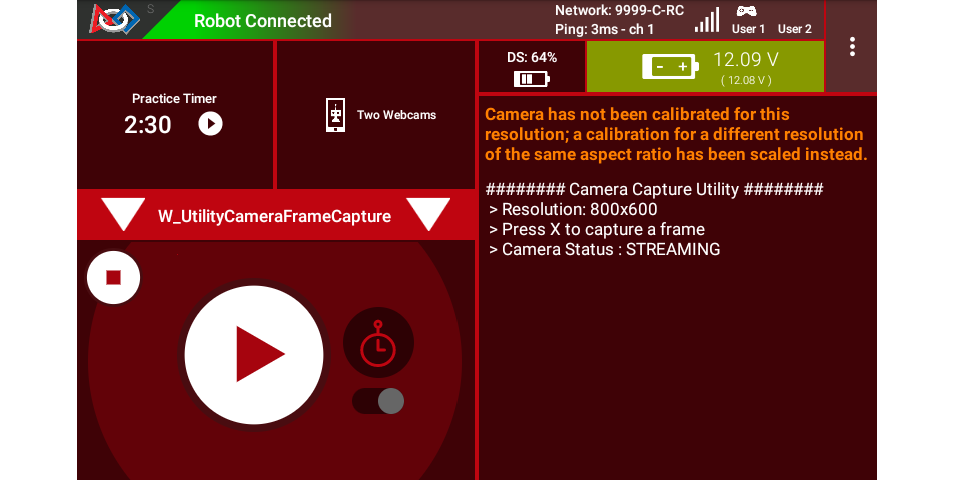
Warning about no calibration at this resolution
The above warning advises the user of this situation, with the opportunity to accept/adjust the scaled estimate or provide actual calibration values.
This warning does not affect the function of capturing and storing camera frames.
SDK Calibration Data
The Logitech C270 webcam offers 18 resolutions, each wanting calibration. The Logitech C920 offers 19 resolutions.
For the “standard” Logitech C270 (from the FIRST Storefront), the SDK 8.2 currently has a set of lens intrinsics for one resolution, 640x480.
Currently the SDK has calibration data for 10 resolutions spread among 4 webcams:
Logitech HD Webcam C270, 640x480
Logitech HD Pro Webcam C920, 640x480, 800x600, 640x360, 1920x1080, 800x448, 864x480
Logitech HD Webcam C310, 640x480, 640x360
Microsoft Lifecam HD 3000 v1/v2, 640x480
These are found in the SDK file builtinwebcamcalibrations.xml. In
Android Studio, navigate to the subfolders RobotCore, res,
xml.
Android RC phone cameras also need calibration data for good pose estimates. The SDK provides no lens intrinsics for these cameras.
Questions, comments and corrections to westsiderobotics@verizon.net