TensorFlow for CENTERSTAGE presented by RTX
What is TensorFlow?
FIRST Tech Challenge teams can use TensorFlow Lite, a lightweight version of Google’s
TensorFlow machine learning technology that
is designed to run on mobile devices such as an Android smartphone or the REV
Control Hub. A trained
TensorFlow model was developed to recognize the white Pixel game piece used in
the 2023-2024 CENTERSTAGE presented by RTX challenge.
This season’s TFOD model can recognize a white Pixel
TensorFlow Object Detection (TFOD) has been integrated into the control system
software to identify a white Pixel during a match. The SDK (SDK
version 9.0) contains TFOD Sample OpModes and Detection Models that can
recognize the white Pixel at various poses (but not all).
How Might a Team Use TensorFlow this season?
For this season’s challenge the field is randomized during the Pre-Match stage.
This randomization causes the white Pixel placed on Spike Marks to be placed on
either the Left, Center, or Right Spike Mark. During Autonomous, Robots must
independently determine which of the three Spike Marks (Left, Center, Right)
the white Pixel was placed on. To do this, robots using a Webcam or a camera on
a Robot Controller Smartphone can inspect Spike Mark locations to determine if
a white Pixel is present. Once the robot has correctly identified which Spike
Mark the white Pixel is present on, the robot can then perform additional
actions based on that position that will yield additional points.
Teams also have the opportunity to replace the white Pixel with an object
of their own creation, within a few guidelines specified in the Game
Competition. This object, or Team Game Element, can be optimized to help the
team identify it more easily and custom TensorFlow inference models can be
created to facilitate recognition. As the field is randomized, the team’s Team
Game Element will be placed on the Spike Marks as the white Pixel would
have, and the team must identify and use the Team Game Element the same as if
it were a white Pixel on a Spike Mark.
Sample OpModes
Teams have the option of using a custom inference model with the FIRST Tech Challenge software or to use the game-specific default model provided. As noted above, the FIRST Machine Learning Toolchain is a streamlined tool for training your own TFOD models.
The FIRST Tech Challenge software (Robot Controller App and Android Studio Project) includes sample OpModes (Blocks and Java versions) that demonstrate how to use the default inference model. These tutorials show how to use the sample OpModes, using examples from previous FIRST Tech Challenge seasons, but demonstrate the process for use in any season.
Using the sample OpModes, teams can practice identifying white Pixels placed
on Spike Marks. The sample OpMode ConceptTensorFlowObjectDetectionEasy is
a simple OpMode to use to detect a Pixel - it is a very basic OpMode simplified
for beginner teams to perform basic Pixel detection.
Example Detection of a Pixel
It is important to note that if the detection of the object is below the minimum confidence threshold, the detection will not be shown - it is important to set the minimum detection threshold appropriately.
Note
The default minimum confidence threshold provided in the Sample OpMode (75%)
is only provided as an example; depending on local conditions (lighting,
image wear, etc…) it may be necessary to lower the minimum confidence in
order to increase TensorFlow’s likelihood to see all possible image
detections. However, due to its simplified nature it is not possible to
change the minimum confidence using the Easy OpMode. Instead, you will
have to use the normal OpMode.
Notes on Training the CENTERSTAGE Model
The Pixel game piece posed an interesting challenge for TensorFlow Object
Detection (TFOD). As is warned in the Machine Learning Toolkit documentation,
TFOD is not very good with recognizing and differentiating simple geometric
shapes, nor distinguishing between specific colors; instead, TFOD is good at
detecting patterns. TFOD needs to be able to recognize a unique pattern,
and while there is a small amount of patterning in the ribbing of the
Pixel, in various lighting conditions it’s dubious how much the ribbing
will be able to be seen. Even in the image at the top of this document, the
ribbing can only be seen due to the specific shadows that the game piece has
been provided. Even in optimal testing environments, it was difficult to
capture video of the object that nicely highlighted the ribbing enough for
TensorFlow to use for pattern recognition. This highlighted the inability to
guarantee optimal Pixel characteristics in unknown lighting environments
for TFOD.
Another challenge with training the model had to do with how the Pixel
looks at different pose angles. When the camera is merely a scant few inches
from the floor, the Pixel can almost look like a solid object; at times
there may be sufficient shadows to see that there is a hole in the center of
the object, but not always. However, if the camera was several inches off the
floor the Pixel looked differently, as the mat or colored tape could be
seen through the hole in the middle of the object. This confused the neural
network and made it extremely difficult to train, and the resulting models
eventually recognized any “sufficiently light colored blob” as a Pixel.
This was not exactly ideal.
Even with the best of images, the Machine Learning algorithms had a difficult
time determining what was a Pixel and what wasn’t. What ended up working
was providing NOT ONLY images of the Pixel in different poses, but also
several white objects that WERE NOT a Pixel. This was fundamental to
helping TensorFlow train itself to understand that “All Pixels are White
Objects, but not all White Objects are Pixels.”
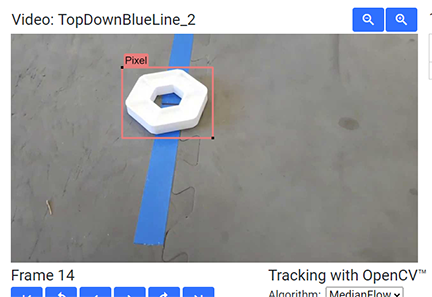
To provide some additional context on this, here are a few examples of labeled
frames that illustrate the challenges and techniques in dealing with the
Pixel game piece.
Training Frame 1
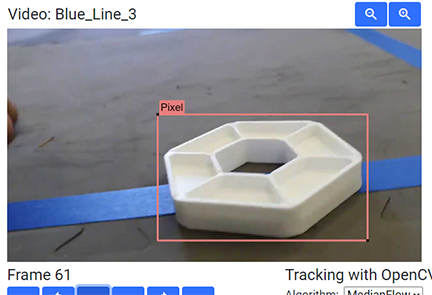
(Rejected) Training Frame 2
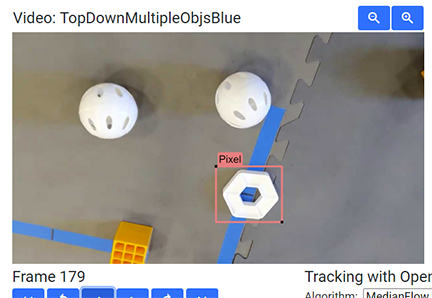
Training Frame 3
Training Frame 4
Using the Default CENTERSTAGE Model
In the previous section it’s described how the height of the camera from the floor
has a huge effect on how the Pixel is seen; too low and the object can look
like a single “blob” of color, and too high and the object will look similar to
a white donut. When training the model, it was decided that the Donut approach was
the best - train the model to recognize the Pixel from above to provide a
clear and consistent view of the Pixel. Toss in some angled shots as well, along
with some additional extra objects just to give TensorFlow some perspective, and
a model is born. But wait, how does that affect detection of the Pixel from the
robot’s starting configuration?
In CENTERSTAGE, using the default CENTERSTAGE model, it is unlikely that a
robot will be able to get a consistent detection of a White Pixel from the
starting location. In order to get a good detection, the robot’s camera needs
to be placed fairly high up, and angled down to be able to see the gray tile,
blue tape, or red tape peeking out of the center of the Pixel. Thanks to
the center structure on the field this season, it’s doubtful that a team will
want to have an exceptionally tall robot - likely no more than 14 inches tall,
but most will want to be under 12 inches to be safe (depending on your strategy
- please don’t let this article define your game strategy!). The angle that
your robot’s camera will have with the Pixel in the starting configuration
makes this seem unlikely.
Here are several images of detected and non-detected Pixels. Notice that
the center of the object must be able to see through to what’s under the
Pixel in order for the object to be detected as a Pixel.
Non-Detected Pixel #1
Non-Detected Pixel #2
Detected Pixel #1
Detected Pixel #2
Detected Pixel #3
Detected Pixel #4
Therefore, there are two options for detecting the Pixel:
The camera can be on a retractable/moving system, so that the camera is elevated to a desirable height during the start of Autonomous, and then retracts before moving around.
The robot will have to drive closer to the Spike Marks in order to be able to properly detect the
Pixels.
For the second option (driving closer), the camera’s field of view might pose a
challenge if it’s desirable for all three Spike Marks to be always in view. If
using a Logitech C270 camera, perhaps using a Logitech C920 with a wider field
of view might help to some degree. This completely depends on the height of the
camera and how far the robot must be driven in order to properly recognize a
Pixel. Teams can also simply choose to point their webcam to the CENTER and
LEFT Spike Marks, for example, and drive closer to those targets, and if a
Pixel is not detected then by process of elimination it must be on the
RIGHT Spike Mark.
Selecting objects for the Team Prop
Selecting objects to use for your custom Team Prop can seem daunting. Questions swirl like “What shapes are going to be recognized best?”, “If I cannot have multiple colors, how do I make patterns?”, and “How do I make this easier on myself?”. Hopefully this section will help you understand a little more about TensorFlow and how to get the most out of it.
First, it’s important to note that TensorFlow has the following quirks/behaviors:
In order to run TensorFlow on mobile phones, FIRST Tech Challenge uses a very small core model resolution. This means the image is downscaled from the high definition webcam image to one that is only 300x300 pixels. This means that medium and small objects within the webcam images may be reduced to very small indistinguishable clusters of pixels in the target image. Keep the objects in the view of the camera large, and train for a wide range of image sizes.
TensorFlow is not really good at differentiating simple geometric shapes. TensorFlow Object Detection is an object classifier, and similar geometric shapes will classify similarly. Humans are much better at differentiating geometric shapes than neural net algorithms, like TensorFlow, at the present.
TensorFlow is great at pattern detection, but that means that within the footprint of the object you need one or more repeating or unique patterns. The larger the pattern the easier it will be for TensorFlow to detect the pattern at a distance.
So what kinds of patterns are good for TensorFlow? Let’s explore a few examples:
Consider the shape of a chess board Rook. The Rook itself is mostly uniform all around, no matter how you rotate the object it more or less looks the same. Not much patterning there. However, the top of the Rook is very unique and patterned. Exaggerating the “battlements”, the square-shaped parts of the top of the Rook, can provide unique patterning that TensorFlow can distinguish.
Consider the outline of a chess Knight, as the “head” of the Knight is facing to the right or to the left. That profile is very distinguishable as the head of a horse. That specific animal is one that model zoos have been optimized for, so it’s definitely a shape that TensorFlow can be trained to recognize.
Consider the patterning in a fancy wrought-iron fence. If made thick enough, those repeating patterns can be recognized by a TensorFlow model. Like the Chess Board Rook, it might be wise to make the object round so that the pattern is similar and repeats now matter how the object is rotated. If allowed, having multiple shades of color can also help make a more-unique patterning on the object (e.g. multiple shades of red, likely must consult the Q&A).
TensorFlow can be used to Detect Plants and all of the plants are a single color. Similar techniques can be reverse-engineered (make objects of different “patterns” similar to plants) to create an object that can be detected and differentiated from other objects on the game field.
Hopefully this gives you quite a few ideas for how to approach this challenge!