Sensors
Listed below are some examples of common robot sensors. While the FIRST Tech Challenge SDK supports many sensors not all are natively supported.
Examples
Distance Sensor (Ultrasonic)
MaxBotix I2C Ultrasonic Sensor

An Ultrasonic Distance Sensor is a device that is able to measure the distance between an object and the sensor. It does this by sending out a sound wave and measuring the time it takes for the wave to travel to the object and back. Using this and the speed of sound the distance can be calculated.
Distance Sensor (Optical)
REV 2m Distance Sensor

An Optical Time of Flight (ToF) Sensor is a device that is able to measure the distance between an object and the sensor. It does this by sending out a light beam and measuring the time it takes for the beam to travel to the object and back. Using this time and the known speed of light the distance can be calculated. Be aware that the way the object in question interacts with light can change the accuracy of the distance measurement. A transparent object like field panels will often provide inaccurate measurements.
Color Sensor
REV Color Sensor

Modern Robotics Color Sensor

A color sensor is usually a digital output device that is able to measure the color of an object. Most color sensors require the object in question to be relatively close to the sensor.
Touch Sensor
REV Touch Sensor

A touch sensor is a digital output device that detects the activation of a button. This can be used as a limit switch, a way to limit the range of motion of a mechanism. Such a device would typically use the digital port.
Magnetic Limit Switch
REV Magnetic Limit Switch

A Magnetic Limit Switch is used to detect the presence of a magnet in near proximity. This is commonly used to limit the range of movement of a mechanism that would cause damage if it went beyond said limit. This is done by placing a magnet on said mechanism which would cause the Limit Switch to activate. It is important to note that as a digital device this will only send out a boolean output and not a range. For measuring the strength of a magnetic field take a look at a magnetometer.
IMU
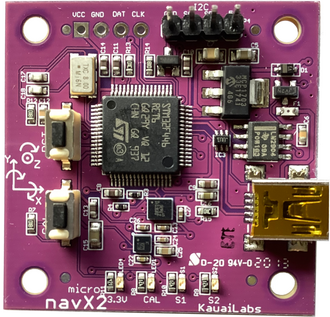
Navigation Sensor
BNO055
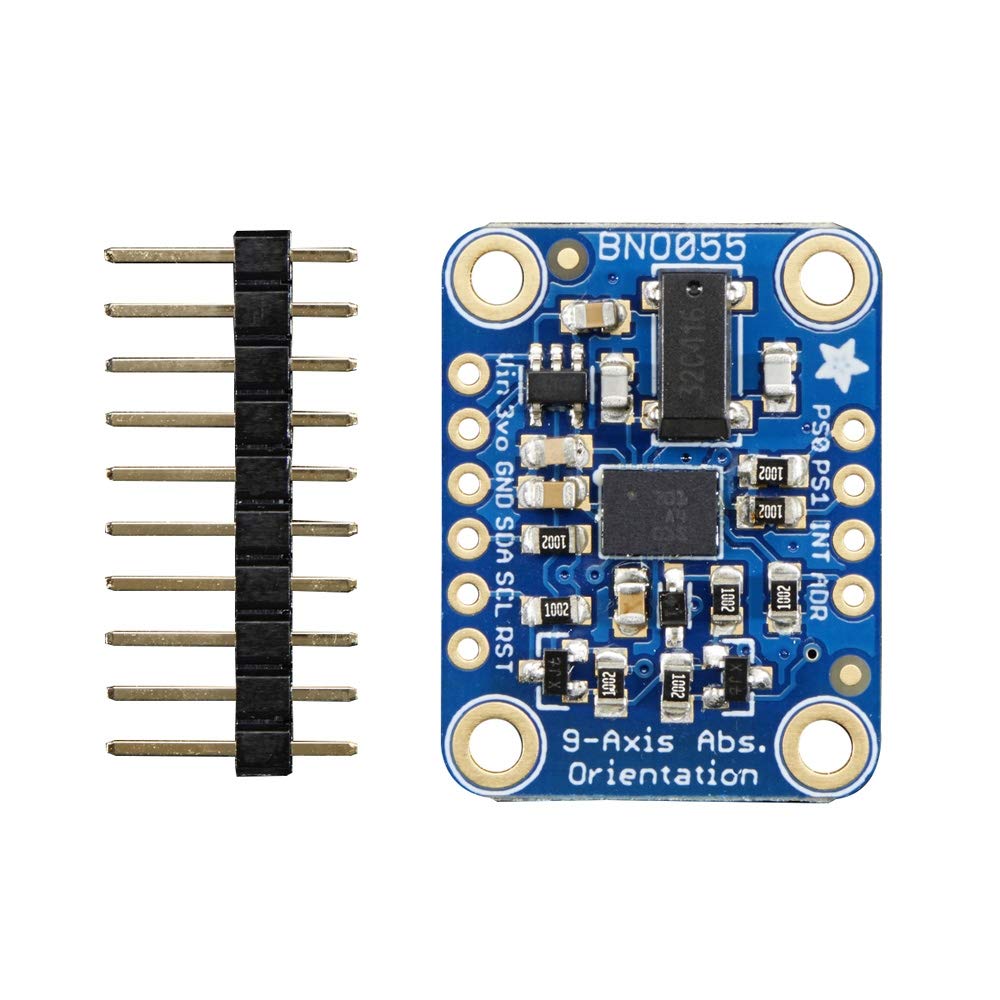
An Interial Measurement Unit (IMU) is a sensor that is a combination of a Gyroscope, Accelerometer, and Magnetometer. A Gyroscope is a device that reports the angular orientation of an object in 3 dimensions. An Accelerometer is a device that reports the acceleration of an object in 3 dimensions. Acceleration can be thought of as the rate of change of speed at any given instant. A Magnetometer is a device that measures the strength of magnetic fields in 3 axes. This can be used as a compass to gain the orientation of a robot relative to the poles of the Earth, an absolute measurement.
Potentiometer
REV Potentiometer
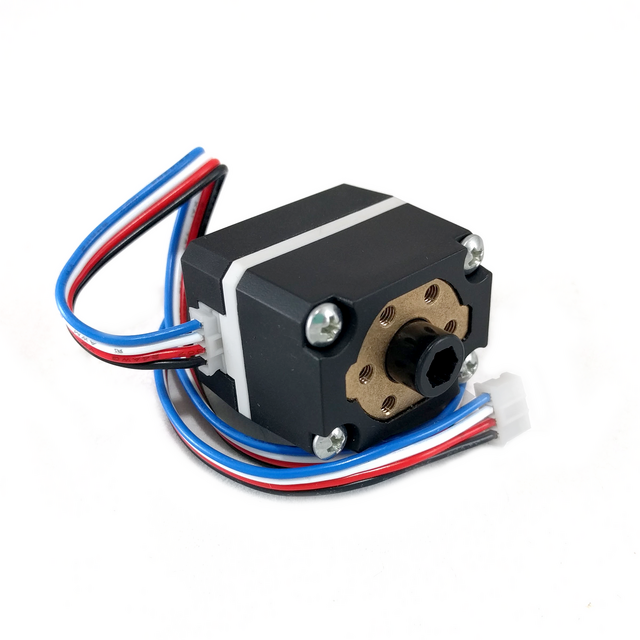
50k Ohm Potentiometer

A Potentiometer is a device that changes the output voltage based upon the degree to which the adjuster is turned. It is often used as a form of measuring the absolute orientation of an axle. The manner in which the output voltage changes is based on the Potentiometer that is used. Such a device is typically attatched via the analog port of the REV Hub.
Sensor Compatibility Chart
Thanks to the folks at REV Robotics for providing this handy chart of sensor compatibility.
Sensor |
Type |
Compatible |
Adapters Needed |
|---|---|---|---|
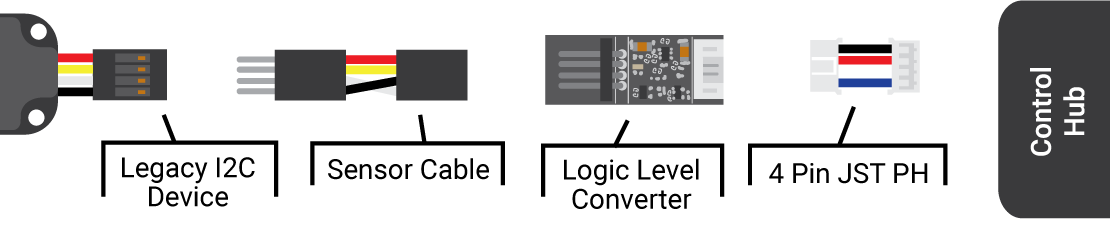
Absolute Orientation IMU Fusion Breakout - BNO0552472Adafruit |
I2C |
Yes |
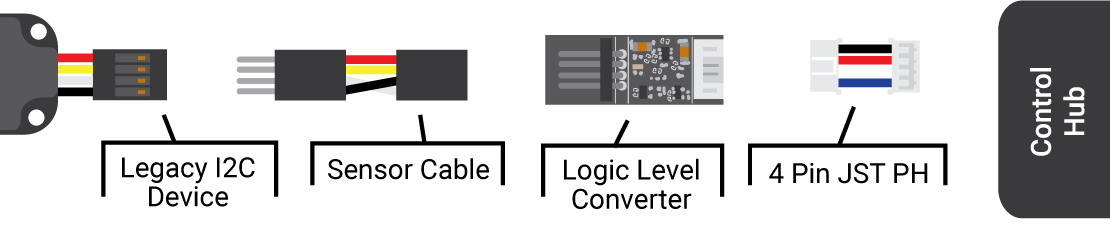
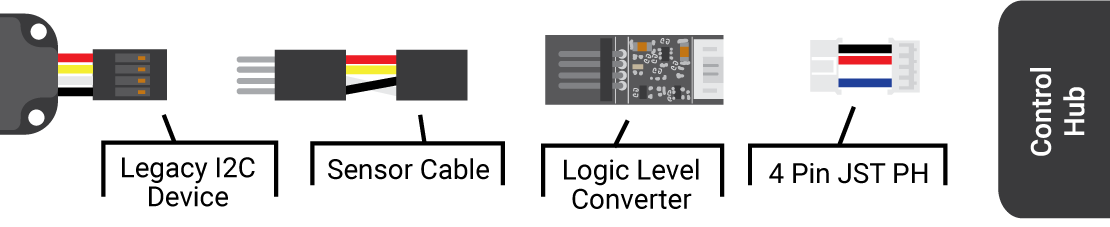
3.3V Compatible
Custom Wiring Harness Needed
|
RGB Color Sensor with IR filter and White LED - TCS347251334AdaFruit |
I2C |
Yes |
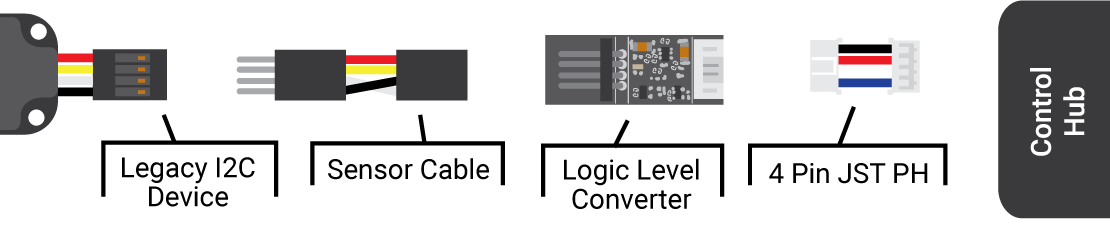
3.3V Compatible
Custom Wiring Harness Needed
|
ColorSensor45-2018Modern Robotics |
I2C |
Yes |
|
Compass45-2003Modern Robotics |
I2C |
Yes |
|
Integrating Gyro45-2005Modern Robotics |
I2C |
Yes |
|
IR Locator 36045-2009Modern Robotics |
I2C |
Yes |
|
IR Seeker V345-2017Modern Robotics |
I2C |
Yes |
|
Ranger Sensor45-2008Modern Robotics |
I2C |
Yes |
|
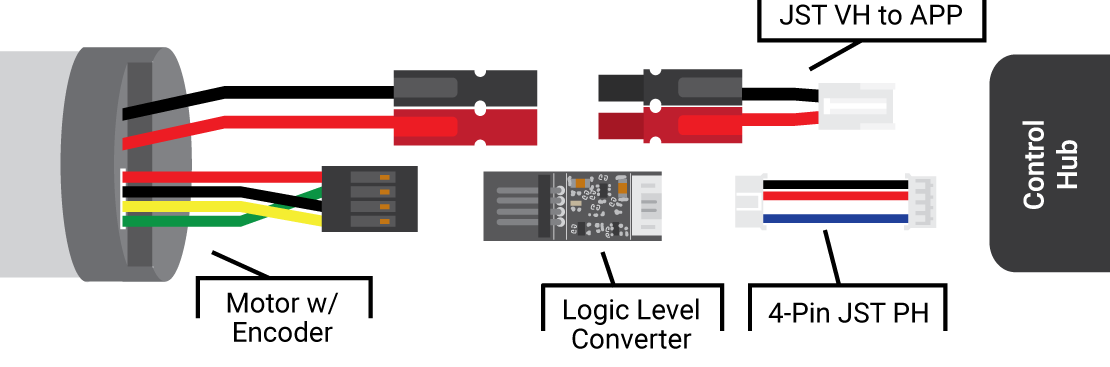
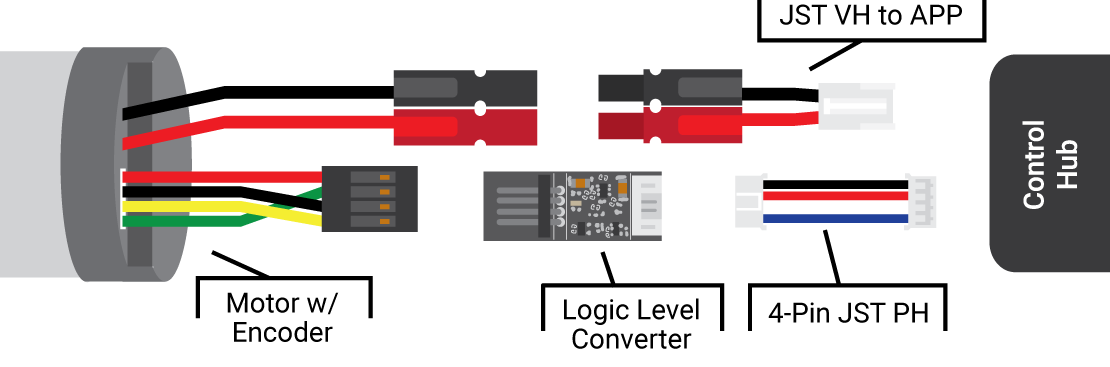
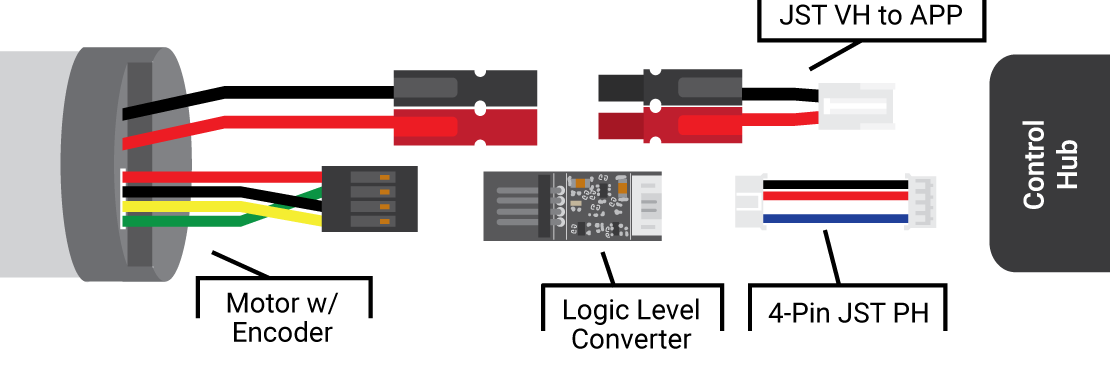
NeveRest MotorAM-3461, AM-3102, AM-2964a, AM-3103, AM-3104AndyMark |
Quad Encoder |
Yes |
|
HD Hex MotorREV-41-1301REV Robotics |
Quad Encoder |
Yes |
Directly Compatible
No Custom Adapters Needed
|
Core Hex MotorREV-41-1301REV Robotics |
Quad Encoder |
Yes |
Directly Compatible
No Custom Adapters Needed
|
12v 4mm Motor Kit50-0119MATRIX |
Quad Encoder |
Yes |
|
12v 6mm Motor Kit50-0120MATRIX |
Quad Encoder |
Yes |
|
Standard Motor Kit50-0001MATRIX |
Quad Encoder |
Yes |
|
Max Motor Shaft Encoder KitW38000Tetrix |
Quad Encoder |
Yes |
|
Limit Switch45-2401Modern Robotics |
Digital |
Yes |
No Adapter Needed
Custom Wiring Harness Required.
|
Rate Gyro45-2004Modern Robotics |
Analog |
No |
Not Officially Supported |
Optical Distance Sensor45-2006Modern Robotics |
Analog |
No |
Not Officially Supported |
Touch Sensor45-2007Modern Robotics |
Analog |
Yes |
No Adapter Needed
Custom Wiring Harness Required
|
Light Sensor45-2015Modern Robotics |
Analog |
No |
Not Officially Supported |
Magnetic Sensor45-2020Modern Robotics |
Analog |
No |
Not Officially Supported |