VisionPortal Previews
Introduction
Managing AprilTag and Color Processing performance is greatly enhanced with visual feedback of the camera’s view.

LiveView demonstrating multiple camera support
The Driver Station and Robot Controller apps offer a camera preview on both devices:
LiveView on Robot Controller (RC) device – RC phone or Control Hub (see below)
Camera Stream on Driver Station (DS) device – DS phone or Driver Hub
LiveView refers only to the Robot Controller preview (example shown above). It’s completely separate from DS Camera Stream, which still operates normally even if LiveView is stopped (manually or automatically).
Instructions for viewing DS Camera Stream are shown here.
Camera Stream uses its own frame collection process, which naturally still
requires the camera/pipeline status to be STREAMING. Disabling the stream
will prevent the DS preview. Camera status is covered at the Managing CPU and
Bandwidth page, and the VisionPortal Camera Controls page.
Side Note: For SDK 8.2, “LiveView” became the new universal name for the RC preview. There remain two instances of old names:
myVisionPortalBuilder.enableCameraMonitoring(true);VIEWPORTappears in the preview status window, when stopped
LiveView on Control Hub
The Control Hub does generate an RC preview, despite not having a built-in screen. LiveView can be seen in two ways:
Plug an HDMI monitor into the Control Hub’s (full-size) HDMI port
Use
scrcpy(pronounced “screen copy”), available here:
Camera Controls
Images in LiveView and Camera Stream are both affected by Camera Controls, for webcam. Changing values of Exposure and Gain, for example, do affect the displayed image and the actual recognitions.
During Camera Stream, manual adjustments to Camera Controls cannot be made in real time (with visible feedback) since gamepads are disabled.
Thus teams wanting to optimize AprilTag or Color Processing recognitions with Camera
Controls should use scrcpy or an HDMI monitor. Doing this via Camera
Stream (“back and forth”) will be less effective and less efficient.
More information is available at the VisionPortal Camera Controls page, and at the Webcam Control tutorial.
BIG Previews
A new feature of SDK 8.2, the Driver Station’s Camera Stream preview can appear regular-size or BIG.
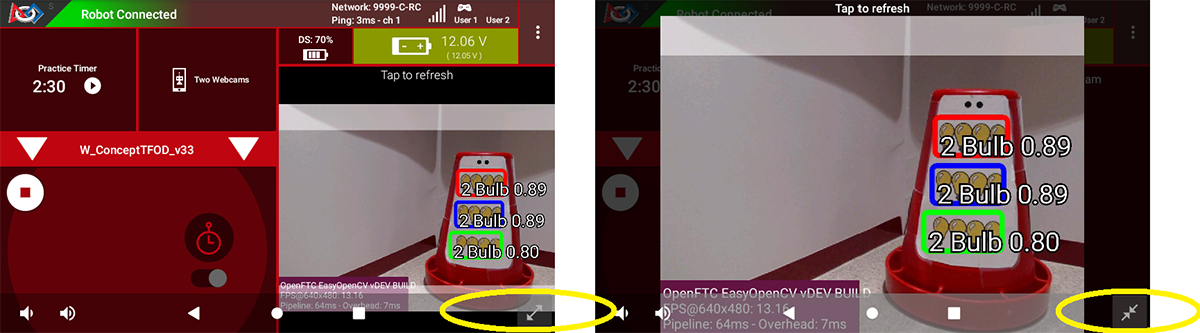
Camera Stream preview enlargement buttons
Circled in yellow are the user buttons to go BIG or return to the default screen.
Note the annotations have shifted to fit in the image.
Orientation Notes
With SDK 8.2, the default image orientation is SENSOR_NATIVE.
This Java enum SENSOR_NATIVE means that the processing pipeline is getting the image in the native orientation of the camera sensor. Namely, no rotation is performed. Note that (former) enum UPRIGHT for a webcam is the same as SENSOR_NATIVE, while for a phone camera, (former) enum SIDEWAYS_LEFT is the same as SENSOR_NATIVE.
SENSOR_NATIVE is ideal because the overhead of rotating the image stream is rather high.
Note that viewing the video stream from the same orientation as the statistics text box will show you the orientation of the stream passed to the AprilTag and/or Color Sensor/Locator processors.
Also note that for RC phone cameras, the LiveView preview is rotated (independent of rotation enum) such that the preview is the way you “expect” as if you were to open the camera app on the phone. That rotation happens during the GPU-accelerated rendering of the bitmap and is significantly easier on resources.
Questions, comments and corrections to westsiderobotics@verizon.net