AprilTag Introduction
Introduction
A popular camera-based technology is AprilTag, a scanned image similar to a QR Code. Its effectiveness and quick set-up on custom Signal Sleeves led to wide adoption in POWERPLAY (2022-2023) by FIRST Tech Challenge teams, especially those programming in Java.

Photo Credit: Mike Silversides
Those POWERPLAY teams, including those using FTC Blocks, learned how to use several resources:
AprilTag: an open-source technology for evaluating formatted images
EasyOpenCV: a FIRST Tech Challenge-optimized interface with OpenCV, an image processing library
myBlocks: custom Blocks created in OnBot Java (OBJ)
Now these three areas are provided, or bundled, in the FIRST Tech Challenge Software Development Kit (SDK), starting with version 8.2.
Namely, key capabilities of AprilTag and EasyOpenCV are available to the Robot Controller (RC) and Driver Station (DS) apps, without special downloads. And AprilTag features are included in FTC Blocks, without needing custom myBlocks.
The AprilTag features work on webcams and on Android RC phone cameras. A single OpMode can use AprilTag and Color Processing.
In FIRST Tech Challenge, AprilTag is ready for the spotlight!
What is AprilTag?
Developed at the University of Michigan, AprilTag is like a 2D barcode or a simplified QR Code. It contains a numeric ID code and can be used for location and orientation.

AprilTags on Robots. Photo Credit: University of Michigan
AprilTag is a type of visual fiducial, or fiducial marker, containing information and designed for easy recognition.
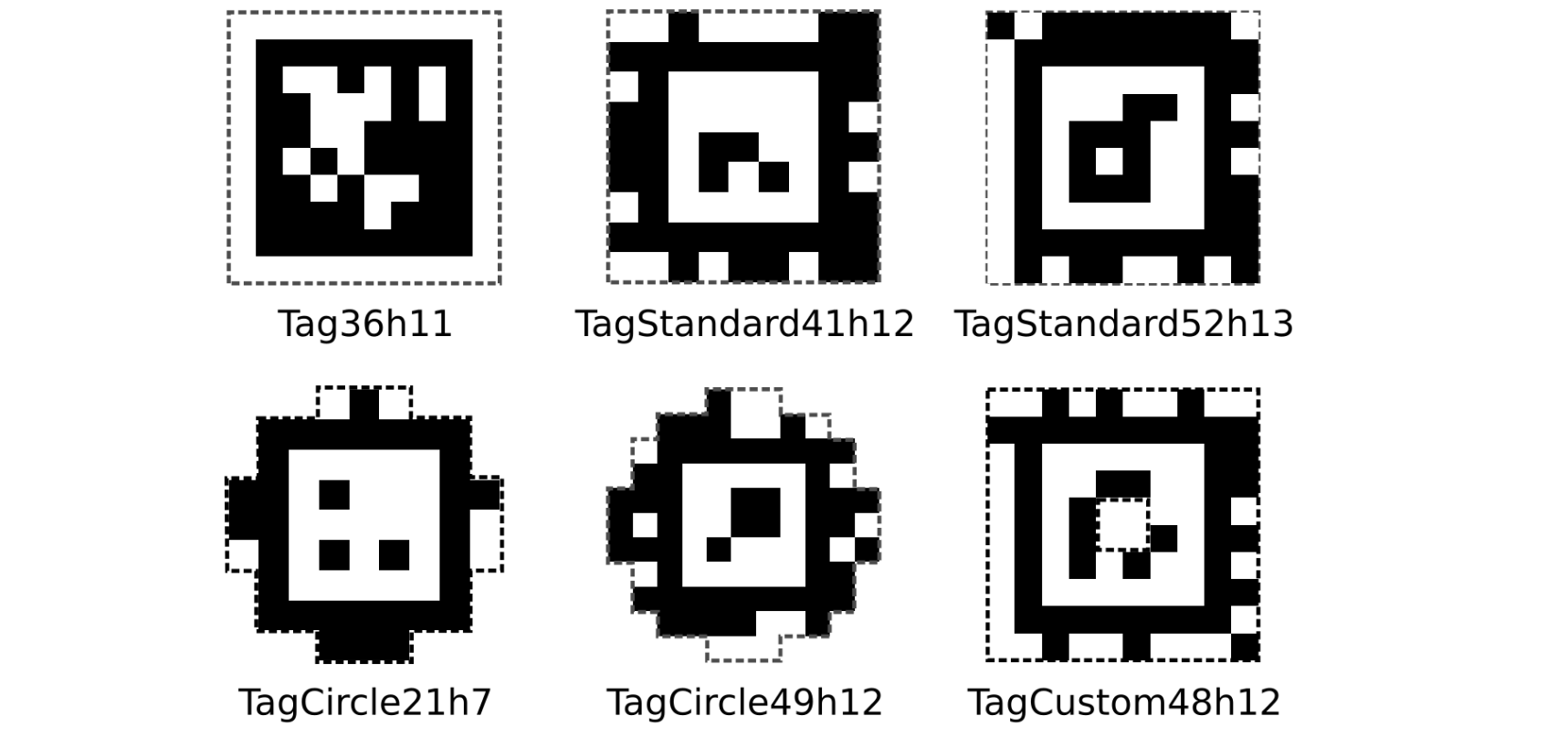
A sample of different AprilTag families
The above samples represent different formats, or families. A project typically uses a single AprilTag family.
FIRST Tech Challenge uses a common family called 36h11. A PDF showing the numbers 0 through 20 from the 36h11 family can be downloaded here:
Each number is the ID code of that tag.
Here’s an AprilTag representing ID code 2. The SDK software recognizes and overlays the ID code onto the image (small blue rectangle ID 02).
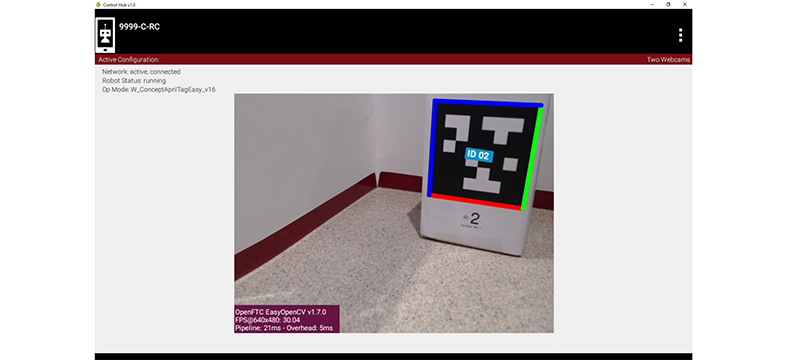
Stream output showing the detected tag ID 02
The above image shows a camera preview image, called LiveView, from a Robot Controller device (Control Hub or RC phone).
The AprilTag family 36h11 has a capacity of 587 ID codes. To see them all, follow this link:
The square AprilTag pattern contains smaller black and white squares, each called a pixel. A 36h11 tag contains 10 x 10 pixels, including an outer border of all white pixels and an inner border of all black pixels.
Tag size is measured across the outside edge of the inner border which comprises the black pixels for 36h11.
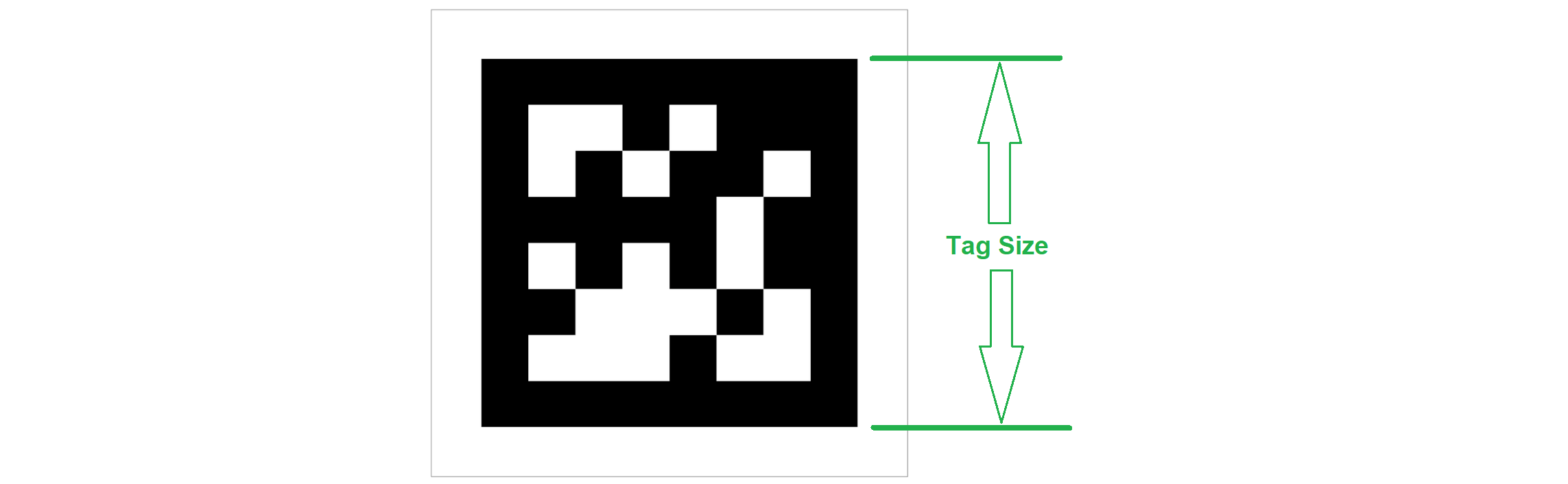
Figure demonstrating the tag size measurement
The above image shows a complete AprilTag with outer white border. From the 36h11 family, its ID code is 42.
AprilTag Pose
Beyond ID code, the new SDK also provides pose data, namely position and orientation (rotation) from the camera’s point of view. This requires a flat AprilTag, which was not possible with curved POWERPLAY Signal Sleeves.
Let’s look again at the camera preview image, called LiveView, from a Robot Controller device (Control Hub or RC phone).
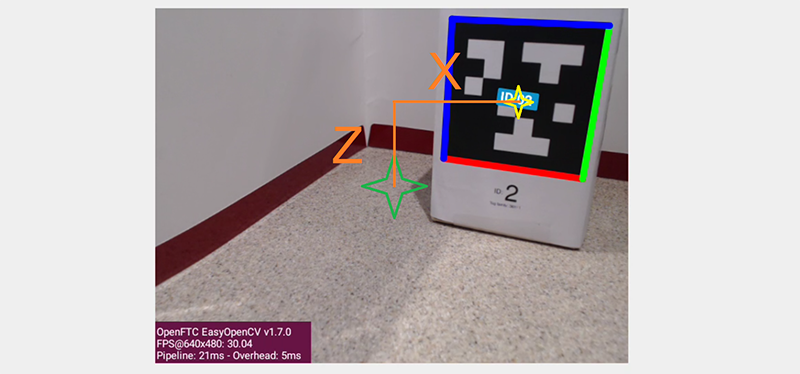
LiveView Image with additional markings for explanation purposes
Imagine a laser beam pointing straight outward from the center of the camera lens. Its 3-dimensional path appears (to the camera) as a single point, indicated by the green star. You can see that the center of the AprilTag (yellow star) is offset from that “laser beam”.
That translation offset can break down into three traditional components (X, Y and Z distances), along axes at 90 degrees to each other:
X distance (horizontal orange line) is from the center, to the right
Y distance (not shown) is from the lens center, outwards
Z distance (vertical orange line) is from the center, upwards
The SDK provides these distances in the real world, not just reporting how many pixels on the screen. Very useful!
You can also see that the AprilTag’s flat face is not parallel to the plane of the camera. That rotation offset can break down into three angles about the X, Y and Z axes. This is discussed further in the section below, called AprilTag Axes.
In summary, the SDK evaluates the AprilTag image and performs “pose estimation”, providing an estimated X, Y and Z distance between the tag and the camera, along with an estimated angle of rotation around those axes. A closer or larger AprilTag can yield a more accurate estimate of pose.
To provide good pose estimates, each RC phone camera or webcam requires calibration data, for a specific resolution. The SDK contains such data for a limited number of webcams and resolutions. Teams can generate their own data, called lens intrinsics, using a provided procedure.
Annotations
In the preview (RC phone screen or DS Camera Stream), an official recognized AprilTag will display a colored border and its numeric ID code. These annotations allow easy visual confirmation of recognition:
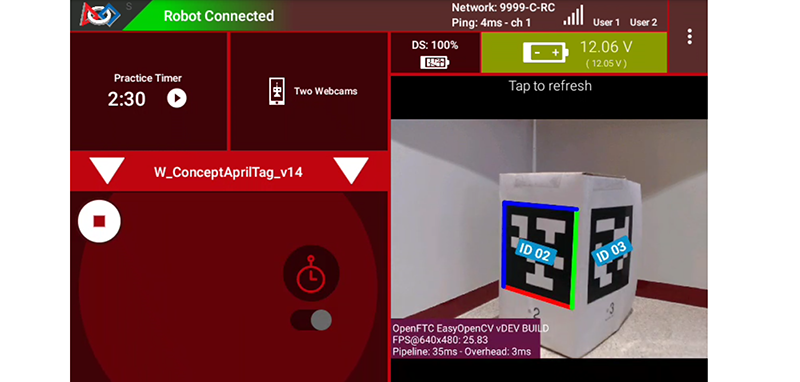
Two AprilTags with different metadata being detected and annotations displayed
In the above DS Camera Stream preview, the left-side AprilTag was recognized from a tag Library (default or customized). A Library tag has pre-loaded information (called Metadata) including its tag size, which allows pose estimation. These are annotated by default with a colored border.
The right-side AprilTag was not in a tag Library. It has no Metadata, so the SDK can provide only its numeric ID code, shown here as ID 03. Such tags are not annotated by default with a colored border.
Note: Camera Stream displays a snapshot of the camera’s view, on the Driver Station device. It’s available only during the INIT phase of an OpMode, and also shows any AprilTag (or Color Processing) annotations. Instructions are posted here:
Optional annotations include colored axes at the tag center, and a colored box projecting from the tag image:
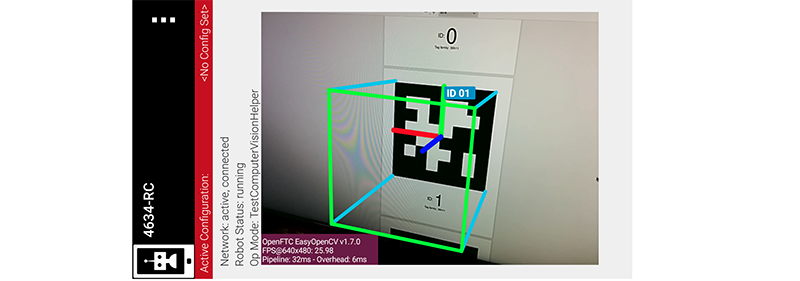
LiveView with additional annotations enabled
The above image shows a preview (called LiveView) on an Android Robot
Controller (RC) phone. The REV Control Hub does generate an RC preview, which
can be seen with an HDMI external monitor, or with scrcpy which can be
found here:
AprilTag Axes
The SDK now provides the underlying pose data as follows:
Position is based on X, Y and Z distance from the camera lens to the AprilTag.
Orientation is based on rotation about those axes, using the right-hand rule.
Note: the optional red-green-blue annotated axes represent the tag’s frame of reference, unrelated to SDK pose data. That annotation indicates only a successful AprilTag recognition.
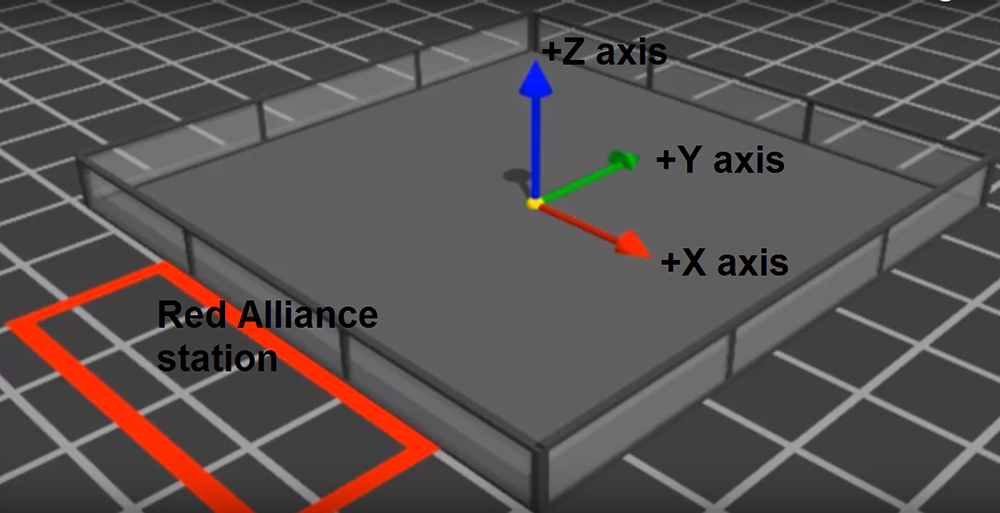
Here are the axis designations in the new SDK:
Y axis points straight outward from the camera lens center
X axis points to the right, perpendicular to the Y axis
Z axis points upward, perpendicular to Y and X
If the camera is upright and pointing forward on the robot, these axes are consistent with the Robot Coordinate System used for IMU navigation.
Note: these axes are different than the official AprilTag definitions, even from the camera’s frame of reference.
The SDK provides AprilTag rotation data as follows:
Pitch is the measure of rotation about the X axis
Roll is the measure of rotation about the Y axis
Heading, or Yaw, is the measure of rotation about the Z axis
Rotation follows the traditional right-hand rule: with the thumb pointing along the positive axis, the fingers curl in the direction of positive rotation.
Further discussion is provided here:
Understanding AprilTag Detection Values
Note: This article does not discuss the FIRST Tech Challenge Field Coordinate System.
Your OpModes might relate robot orientation to the overall field or
‘global coordinates’
for navigation, but that’s beyond this AprilTag introduction.
{kind=link}
Advanced Use
Option 1
If a tag’s position and orientation on the game field are specified in advance, the tag’s pose data could be used by an advanced OpMode to calculate the robot’s position on the field. This conversion math, an exercise for the reader, can allow a robot to use the tag’s pose data in real-time to navigate to the desired location on the field.
Option 2
Vision processing can consume significant CPU resources and USB communications bandwidth. FIRST Tech Challenge teams may balance the benefits of higher resolution and speed (frames-per-second) against the risk of overloading CPU and bandwidth resources. The SDK 8.2 or later provides numerous tools to manage this balance:
select the camera resolution
disable and enable the RC preview (called LiveView)
disable and enable the AprilTag (or Color Processing) processor
close the camera stream
select a compressed video streaming format
measure frames-per-second
set decimation (down-sampling)
select a pose solver algorithm
Option 3
Clearer camera images can improve AprilTag (and Color Processing) vision processing. The SDK offers powerful webcam controls (Exposure, Gain, Focus, and more), also available in FTC Blocks! These controls can be applied under various lighting conditions.
Exposure and Gain are adjusted together. The SDK offers Java Sample
OpMode ConceptAprilTagOptimizeExposure.java.
Option 4
The frame of reference described above in AprilTag Axes is calculated and provided by default in the 8.2 SDK or later. Advanced teams may prefer to perform their own pose calculations, based on raw values from the AprilTag/EasyOpenCV pipeline.
Those raw values are available to Java and Blocks programmers. The Java version is shown here:
for (AprilTagDetection detection : aprilTag.getDetections()) {
Orientation rot = Orientation.getOrientation(detection.rawPose.R, AxesReference.INTRINSIC, AxesOrder.XYZ, AngleUnit.DEGREES);
// Original source data
double poseX = detection.rawPose.x;
double poseY = detection.rawPose.y;
double poseZ = detection.rawPose.z;
double poseAX = rot.firstAngle;
double poseAY = rot.secondAngle;
double poseAZ = rot.thirdAngle;
}
These raw values are converted by the SDK to the default interface, as follows:
if (detection.rawPose != null) {
detection.ftcPose = new AprilTagPoseFtc();
detection.ftcPose.x = detection.rawPose.x;
detection.ftcPose.y = detection.rawPose.z;
detection.ftcPose.z = -detection.rawPose.y;
Orientation rot = Orientation.getOrientation(detection.rawPose.R, AxesReference.INTRINSIC, AxesOrder.YXZ, outputUnitsAngle);
detection.ftcPose.yaw = -rot.firstAngle;
detection.ftcPose.roll = rot.thirdAngle;
detection.ftcPose.pitch = rot.secondAngle;
detection.ftcPose.range = Math.hypot(detection.ftcPose.x, detection.ftcPose.y);
detection.ftcPose.bearing = outputUnitsAngle.fromUnit(AngleUnit.RADIANS, Math.atan2(-detection.ftcPose.x, detection.ftcPose.y));
detection.ftcPose.elevation = outputUnitsAngle.fromUnit(AngleUnit.RADIANS, Math.atan2(detection.ftcPose.z, detection.ftcPose.y));
}
Again, further discussion is provided here:
Summary
AprilTag is a popular camera-based technology, using a scanned image similar to a QR Code.
The SDK version 8.2 or later includes key capabilities of AprilTag and EasyOpenCV, a FIRST Tech Challenge-optimized interface with OpenCV for image processing. These methods are packaged for convenient use by Java and Blocks programmers.
By default, the SDK can detect the ID code for any AprilTag in the 36h11 family.
For AprilTags in a default or custom tag Library, the interface provides calculated pose estimates (position and rotation) from the camera’s frame of reference. The source data is also available for advanced teams.
The AprilTag features work on Android RC phone cameras, and on webcams. Each camera requires calibration data, for a specific resolution, to provide good pose estimates.
Multiple cameras are supported, and a single OpMode can use AprilTag and Color Processing. AprilTag detection is improved with webcam Camera Controls, available also in FTC Blocks.
In FIRST Tech Challenge, AprilTag is ready to take CENTERSTAGE!
Much credit to:
EasyOpenCV developer @Windwoes
FTC Blocks developer @lizlooney
FTC navigation expert @gearsincorg
and the smart people at UMich/AprilTag.
Questions, comments and corrections to westsiderobotics@verizon.net