Automatically Loading a Driver Controlled Op Mode
A FIRST Tech Challenge match consists of a 30 second autonomous period followed by a 2 minute driver controlled (i.e., tele-operated or teleop) period. Previously, teams had to manually select their teleop op mode after the autonomous portion their match was over.
Teams can now preselect their teleop op mode, and have the Driver Station automatically load this op mode as soon as their autonomous run has completed. This feature can help a team avoid selecting the wrong op mode during a match.
To use this feature, verify that you are using version 6.1 or greater of the SDK software (Robot Controller and Driver Station).
Select an autonomous program to use during your match. The preselect button will appear in the lower left corner of the screen. It will be translucent and have no text adjacent to it, indicating the feature is inactive.

The preselect button will appear once an autonomous OpMode has been selected in landscape mode.
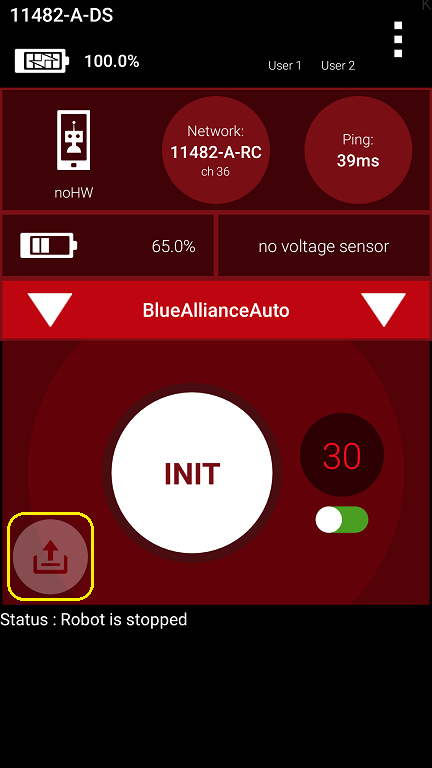
The preselect button will appear once an autonomous OpMode has been selected in portrait mode.
Note that in order for the preselect button to be visible, the selected op mode must be designated as an autonomous op mode either by using the _@Autonomous_ annotation if it is written using Java or by selecting the Autonomous option in the Blocks editor. If you do not see the preselect button, verify that your currently selected op mode has been designated as autonomous.
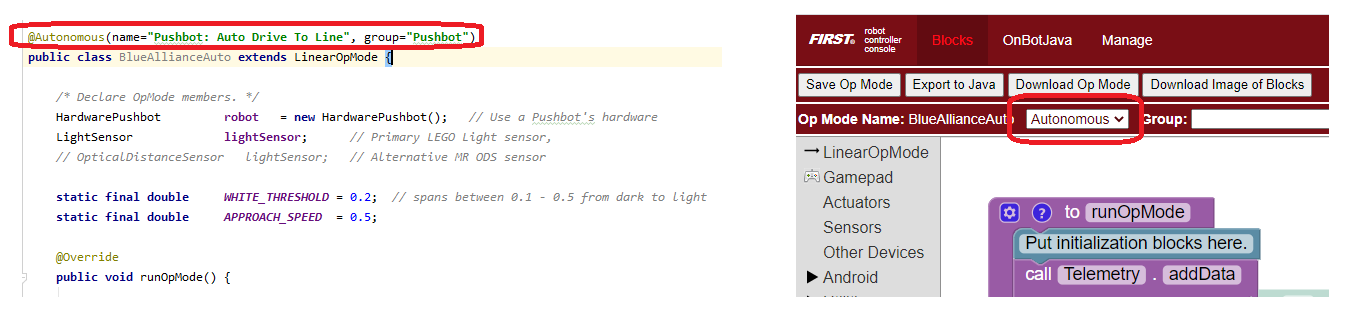
The selected op mode must be designated as Autonomous in order for the preselect button to be visible.
To activate it, simply tap the (translucent) button and select an op mode. The button will then become fully opaque and the name of the preselected op mode will appear adjacent to the button. This indicates the feature is active.

The driver controlled OpMode to be auto-loaded in landscape mode.
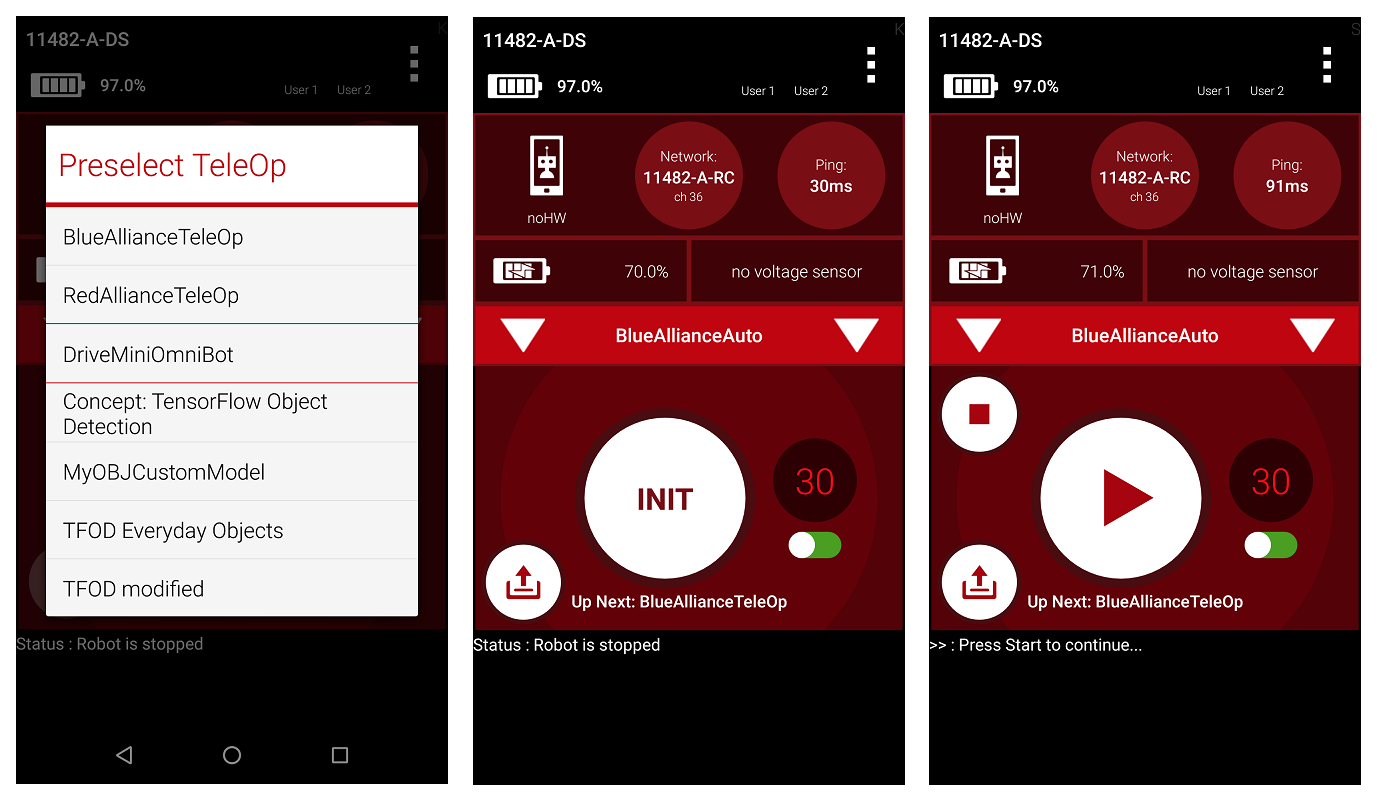
The driver controlled OpMode to be auto-loaded in portrait mode.
Should you then wish to disable it, simply long press the preselect button. It will become translucent again and the text adjacent to it will disappear.
After the Autonomous program ends, the Driver Station changes the queued OpMode to the TeleOp program which was preselected before the start of Autonomous. The auto-preselection will be aborted if the user presses stop (either the main stop or init stop buttons). It will only transition if the OpMode either self-exits, or is terminated by the 30s timer. Drive Teams must still press Init and start the op mode manually, for safety reasons.
Should you wish to not be required to manually enable and configure the
preselection feature each time you want to run your Autonomous program,
you can edit your OpMode annotation to include
preselectTeleOp="My TeleOp Name". The Driver Station will then
automatically activate the preselection feature and configure it to
preselect the OpMode specified in the annotation.
@Autonomous(name="Blue Alliance Auto", group="Pushbot", preselectTeleOp="BlueAllianceTeleOp")
Blocks users can make use of this feature as well, through a new dropdown in the Blocks program editor.
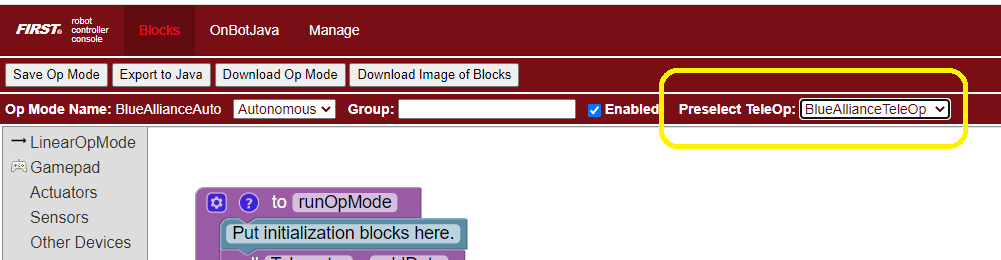
You can preselect a teleop op mode mode using the Blocks editor.
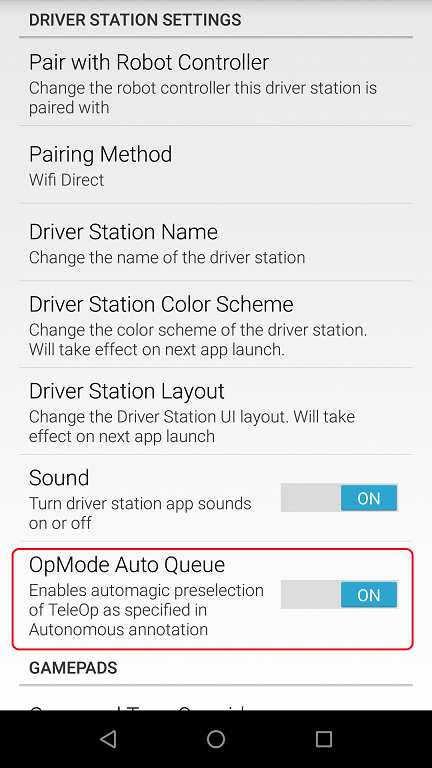
Note that there is an option in the Settings menu of the Driver
Station app called “OpMode Auto Queue”. If this option is enabled, then
the Driver Station will automatically load an autonomous op mode’s
preselected teleop op mode as designated by the preselectTeleOp
parameter. If this option is disabled, then the Driver Station will not
automatically load the preselected teleop op mode. If the “Op Mode Auto
Queue” option is disabled, a team can still select a teleop op mode by
using the preselect button on the main Driver Station activity.

If the OpMode Auto Queue option is enabled, the Driver Station will automatically load the preselectTeleOp op mode in landscape mode.
If the OpMode Auto Queue option is enabled, the Driver Station will automatically load the preselectTeleOp op mode in portrait mode.