FIRST Tech Challenge introduces VisionPortal, a comprehensive new
interface for vision processing.
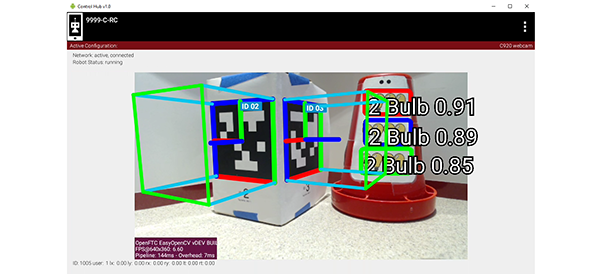
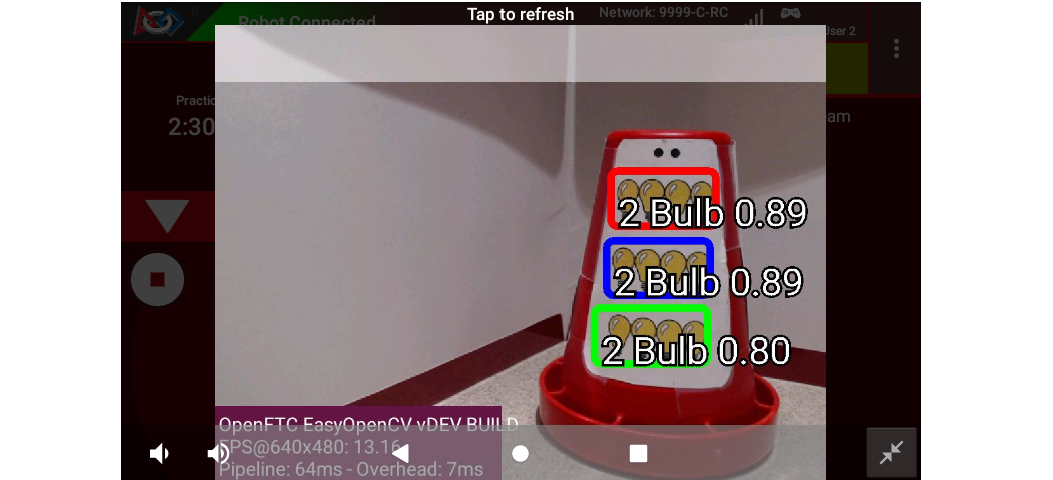
For FTC Blocks and Java teams, VisionPortal offers key capabilities of
AprilTag and EasyOpenCV, along with TensorFlow Object Detection
(TFOD) – at the same time!
Many other new and improved features await your discovery
in VisionPortal and beyond.
In preparation for the 2023-2024 CENTERSTAGE season, the new Software
Development Kit (SDK) VisionPortal includes built-in support for AprilTag
technology. Previously, Teams needed to download and incorporate external
libraries, complicating the programming effort.
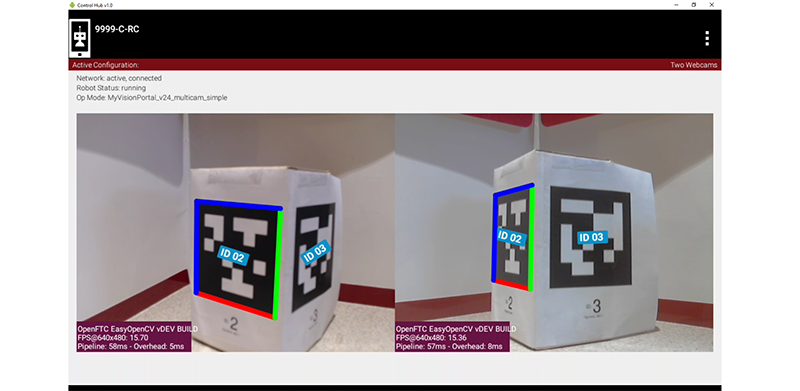
AprilTag is a popular vision technology for detecting a simple black-and-white
tag, used to estimate position and orientation. In the 2022-2023 POWERPLAY
game, many Teams enjoyed AprilTag’s reliable Autonomous performance for
Signal Sleeve recognition.
The SDK describes AprilTag pose relative to the camera, by default.
This computing process is called pose estimation, a term that emphasizes
this is an estimate only, based on many factors including camera
calibration. You must determine AprilTag’s best use for reaching your
goals.