Computer Vision Overview
Introduction
The FIRST Tech Challenge control system software has built-in support for two computer vision technologies:
AprilTags - AprilTags are fiducial markers similar in design to a QR code that can be used for identification and localization. AprilTags are used as reference points for autonomous navigation and for assisted navigation and identification of points of interest on a game field.
Each season, FIRST provides 2D image tagets that can be used as navigational reference points.
If the AprilTag system recognizes an AprilTag image, it provides very accurate pose information (assuming the camera used has calibration parameters for the working resolution) about the robot’s position relative to the target.
A robot can use this information to navigate autonomously on the field.
Color Processing - Color Processing is a feature in the FIRST Tech Challenge SDK that provides the ability to process colors using OpenCV.
Color Sensor can detect the exact color in an image, which can help determine what is in front of a robot.
Color Locator can look for a specific color and return information about the size, shape and location of the color in the camera frame.
A robot can use this information to navigate to the recognized object.
AprilTags vs Color Processing
AprilTag Advantages
Very efficient with a fast detection rate (estimated 15 to 20 detections per second, depending on decimation and target size).
Provides accurate, relative pose information of camera to target in field coordinates.
Is less prone to fluctuating or varied lighting conditions on the field.
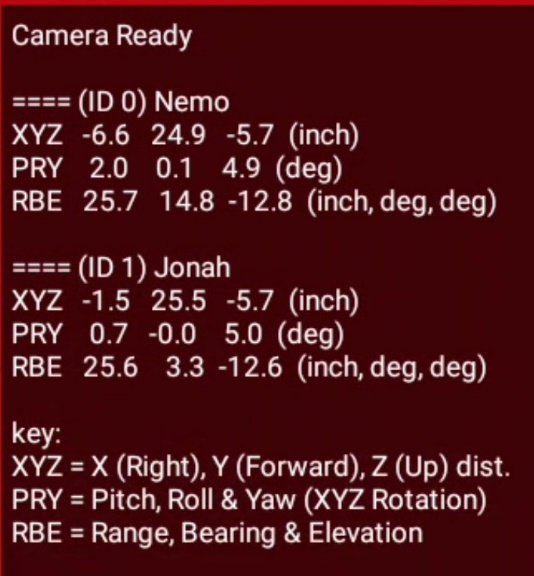
AprilTag can provide accurate pose information to target
AprilTag Disadvantages
The entire AprilTag must be in the camera view in order to be recognized, any occlusions render the object unprocessable.
AprilTags must be included in the tag library in order to process pose information for the tag (tag size and value must be known to the AprilTag system in advance).
Cameras require calibration data for every resolution used in order to process correct pose information.
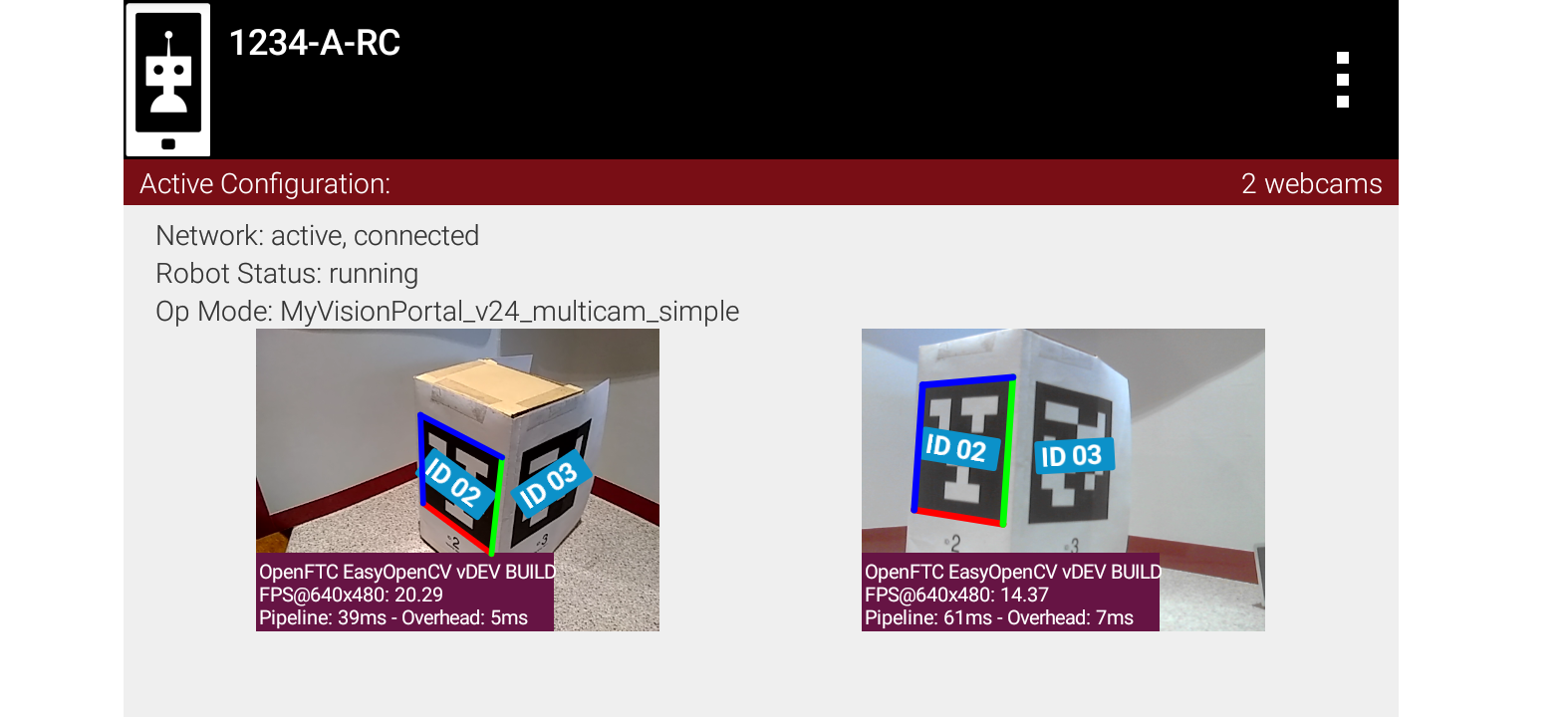
AprilTags not in Tag Library detected, but no pose data available
Color Processing Advantages
Color Processing looks for colors, not specific images.
Recognizes objects in spite of different backgrounds.
Recognizes objects both up close and further away.
Recognizes objects even when objects are oriented in different positions.
Pre-defined colors are included in the FIRST Tech Challenge SDK that have already been tested on season-specific game elements.
Color Processing Disadvantages
Color Processing can be sensitive to different lighting conditions.
If Color Processing recognizes an object in its field of view, it only returns location information on where the target object is within its field of view.

Color Processing can recognize actual objects (and not just 2D image targets).

Color Processing can recognize the shape of the object.
Which Should I Use?
The choice of whether to use AprilTags or Color Processing will be influenced by factors such as distance-to-target, lighting, accuracy required, camera placement and etc..
If the object and tag can always be guaranteed to be in a specific orientation and the tag fully visible, AprilTags are likely the best solution. However, if the object does not belong to you or a tag is not able to be physically placed on the object, Color Processing can be a good solution.