TensorFlow for POWERPLAY presented by Raytheon Technologies
What is TensorFlow?
FIRST Tech Challenge teams can use TensorFlow Lite, a lightweight version of Google’s TensorFlow machine learning technology that is designed to run on mobile devices such as an Android smartphone. A trained TensorFlow model was developed to recognize the three game-defined images on the Signal element used in the 2022-2023 POWERPLAY presented by Raytheon Technologies challenge.
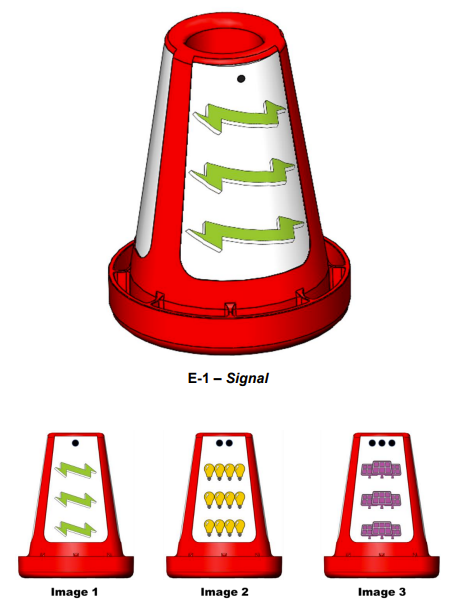
This season’s TFOD model can recognize Signal image elements
TensorFlow Object Detection (TFOD) has been integrated into the control system software to identify these Signal images during a match. The SDK (SDK version 8.0) contains TFOD Sample Op Modes and Detection Models that can recognize and differentiate between the Signal images: Bolt (green lightning bolt), Bulb (4 yellow light bulbs), and Panel (purple solar panels).
Note
TensorFlow Lite runs on Android 6.0 (Marshmallow) or higher, a requirement met by all currently allowed devices. If you are a Blocks programmer using an older/disallowed Android device that is not running Marshmallow or higher, TFOD Blocks will automatically be missing from the Blocks toolbox or design palette.
How Might a Team Use TensorFlow this season?
For this season’s challenge, during the pre-Match stage a single die is rolled and the field is randomized. The random value of the die determines how field reset staff will rotate the Signal to show one of the three images on the Signal to the robot - Signal images are offset 120 degrees on the Signal to occlude all images other than the chosen one. Robots must independently determine which of the three images (Image 1, Image 2, or Image 3, indicated by the number of dots above the image either on the Signal stickers or on the Team Specific Signal Sleeve) is showing. Once the robot has correctly identified the Image being shown, the robot can then know in which zone to end the Autonomous Period for additional points.
Sample Op Modes
Teams have the option of using a custom inference model with the FIRST Tech Challenge software or to use the game-specific default model provided. As noted above, the FIRST Machine Learning Toolchain is a streamlined tool for training your own TFOD models.
The FIRST Tech Challenge software (Robot Controller App and Android Studio Project) includes sample op modes (Blocks and Java versions) that demonstrate how to use the default inference model. These tutorials show how to use the sample op modes, using examples from previous FIRST Tech Challenge seasons, but demonstrate the process for use in any season.
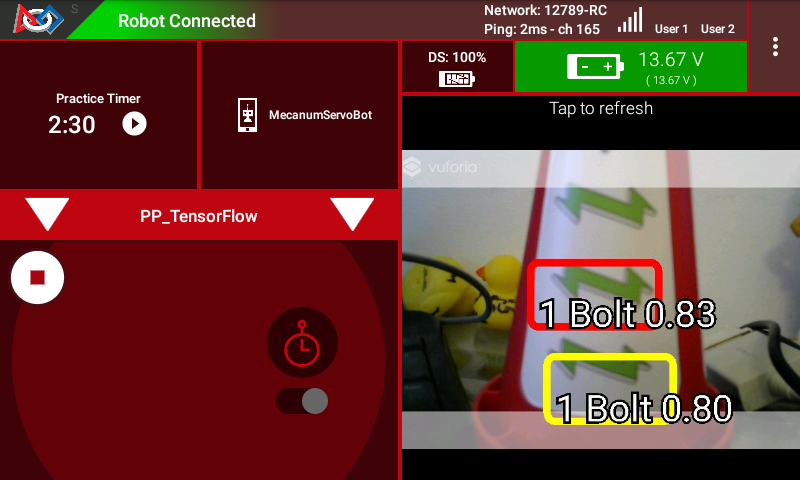
Using the sample Op Modes, each of the Signal images can be detected. Here are a few examples of detecting the images.
Example Image 1
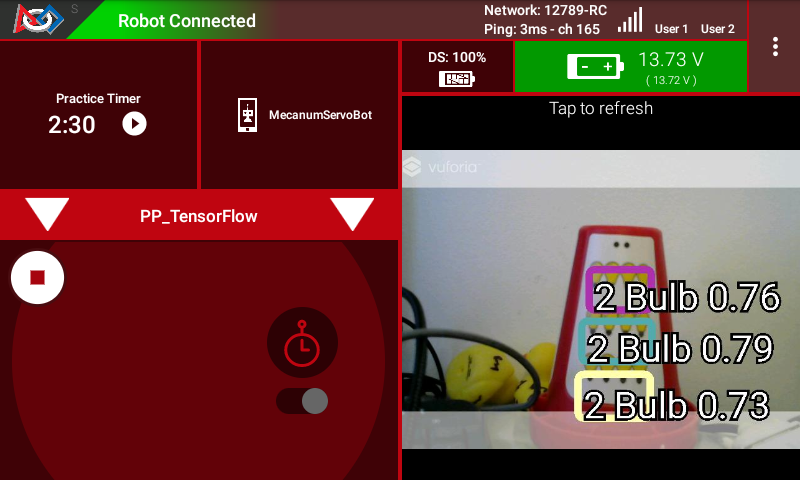
Example Image 2
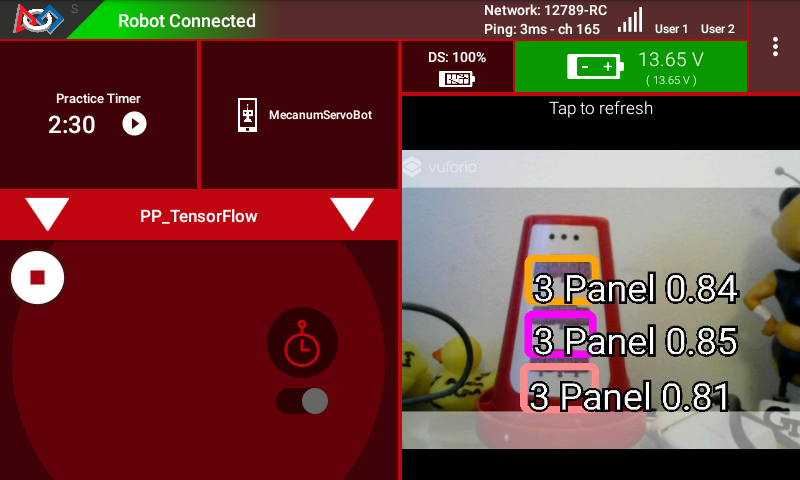
Example Image 3
It is important to note that if the detection of the object is below the minimum confidence threshold, the detection will not be shown - it is important to set the minimum detection threshold appropriately.
Note
The default minimum confidence threshold provided in the Sample Op Mode is only provided as an example; depending on local conditions (lighting, image wear, etc…) it may be necessary to lower the minimum confidence in order to increase TensorFlow’s likelihood to see all possible image detections.
Default POWERPLAY Model Detection Notes
As shown in the previous examples, with the default POWERPLAY TensorFlow model it is sometimes more common for TensorFlow to recognize/label partial image areas (upper or lower portions of the images) than whole images themselves. This is likely due to how the training set was developed during training of the TensorFlow model.
In order to try to ensure that there would be as many detections for a given set of images as possible, the training set included frames that contained both complete and partial images; it just happened that the way the frames were developed there were more upper and lower partial images than whole images, and it appears that TensorFlow’s neural network seems to almost “prefer” to recognize partial images rather than whole images. Such biases are common.
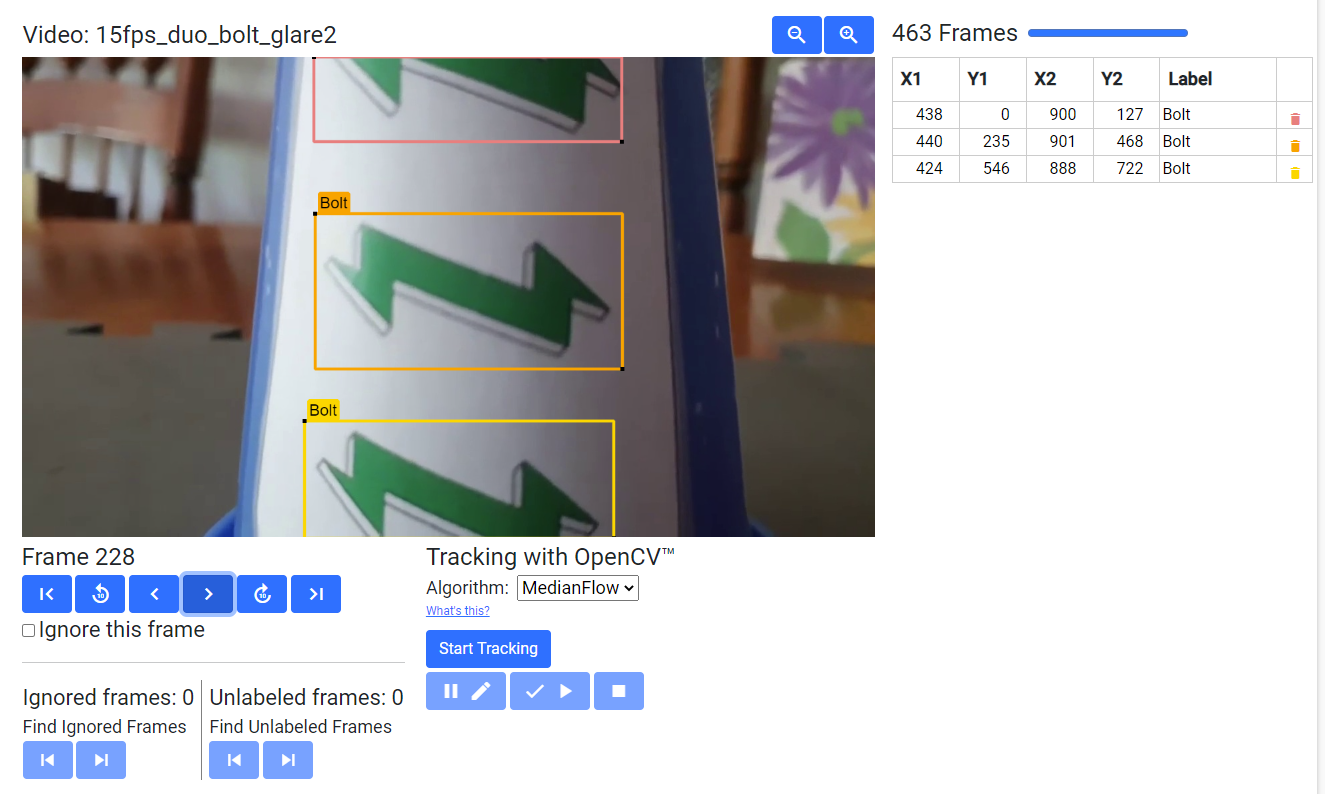
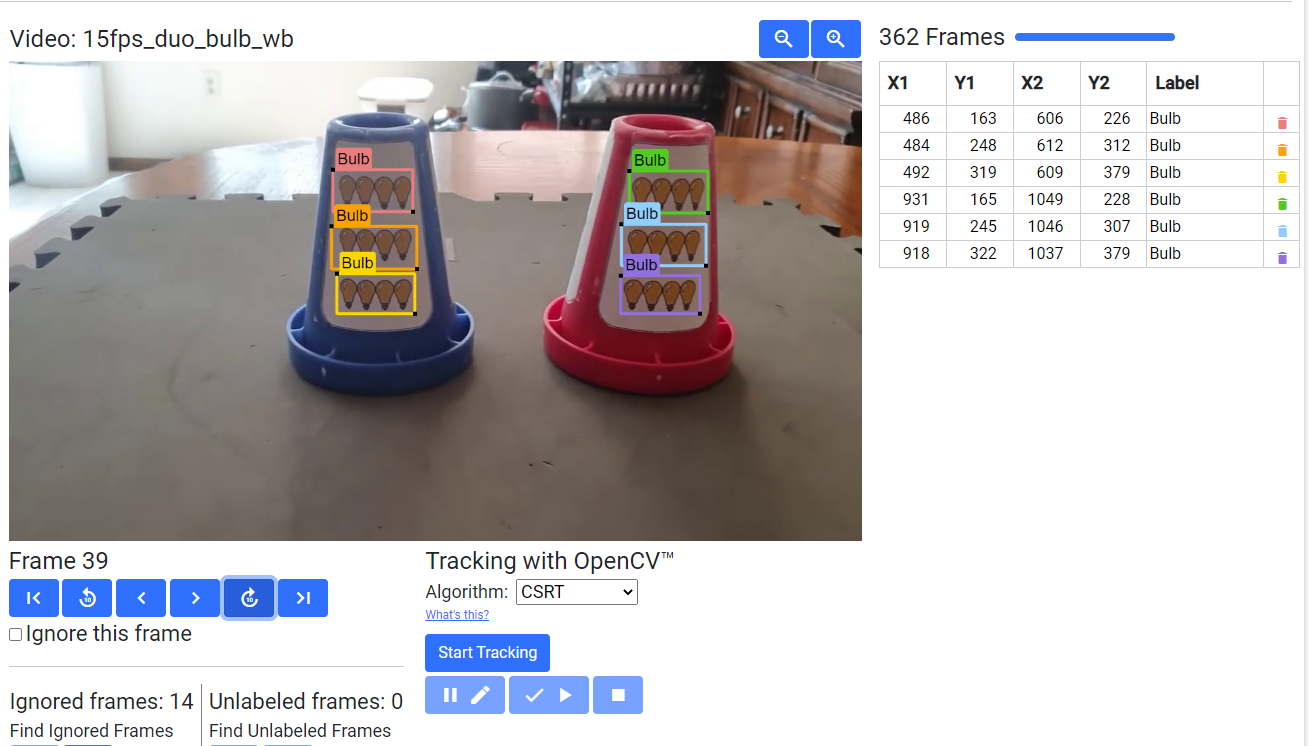
To provide some additional context on this, here are a few examples of labeled frames that were used to train the default TensorFlow model.
Example Training Frame 1
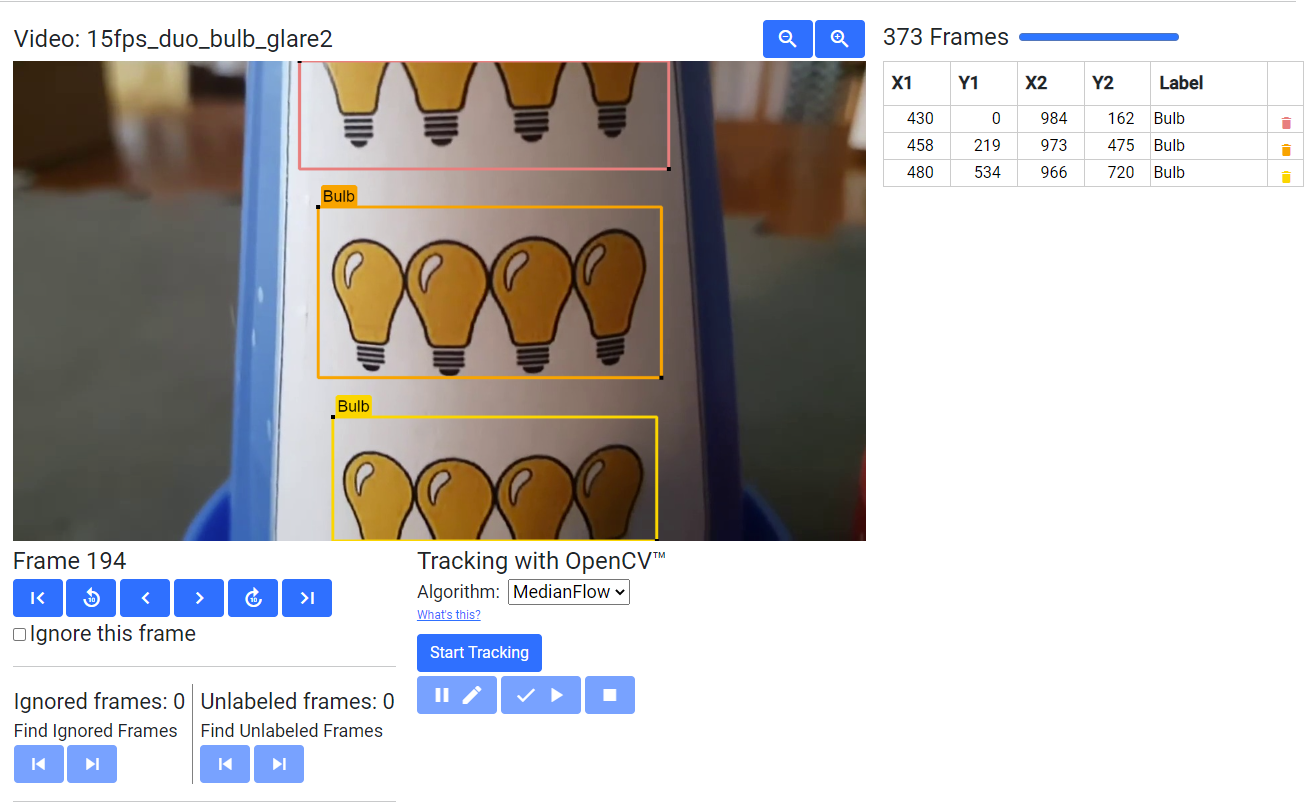
Example Training Frame 2
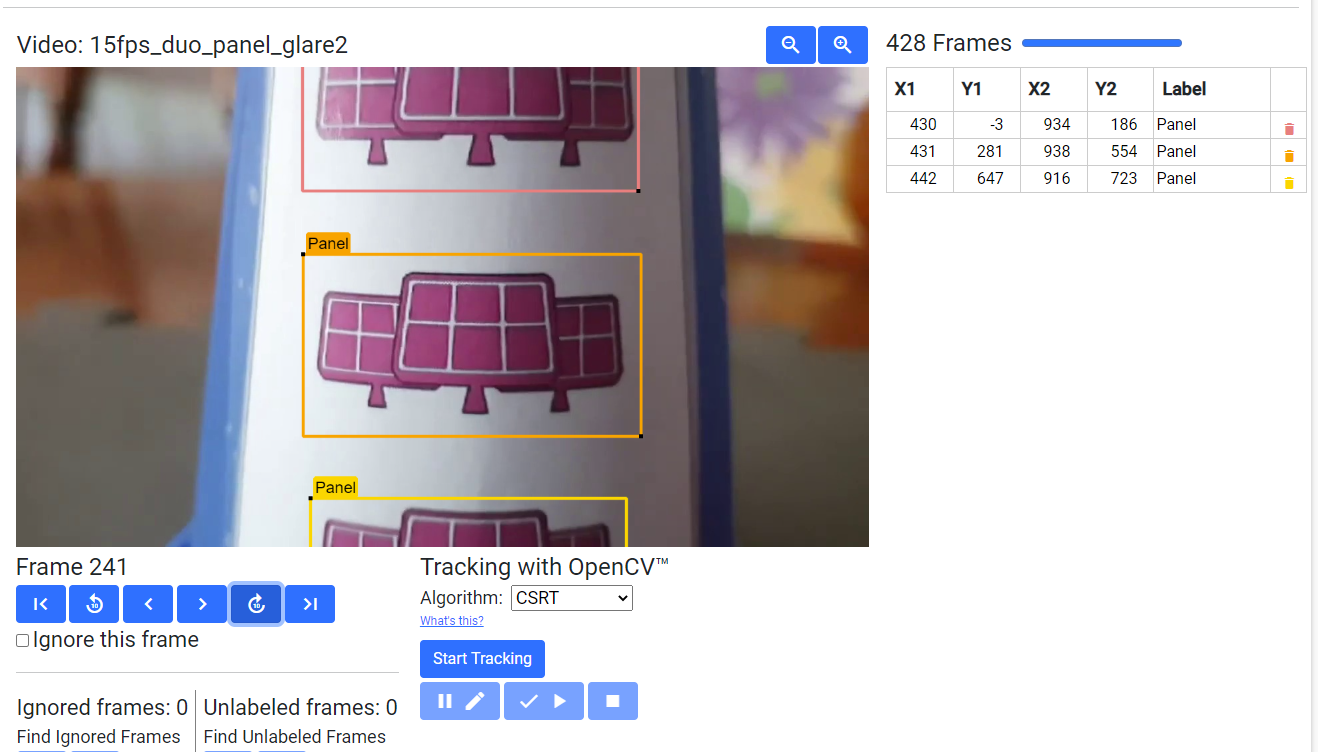
Example Training Frame 3
Understanding Backgrounds For Signal Sleeves
When thinking about how to develop a custom Signal Sleeve, it’s easy to overlook one of the most important elements that may make or break your ability to detect objects - your image background. TensorFlow attempts to identify common background material and “ignore” the backgrounds for detecting labeled objects; a great example of this is the white background on the sticker. It should be known that the white background on the stickers posed quite a challenge, one that teams should be aware of when/if attempting to develop their own images for their Signal Sleeves.
If the same background is always present, and always has similar characteristics in the training data, TensorFlow may assume the background isn’t actually a background and is really a part of the image. TensorFlow may then expect to see the specific background with the objects always. If the background of the image then varies for whatever reason, TensorFlow may not recognize the image with the new background.
A great example of this occurred in 2021 Freight Frenzy; the duck model was trained to recognize a rubber duck, and the rubber duck just happened to always be present on a gray mat tile within the training frames. The model happened to “expect” a gray mat tile in the background, and rubber ducks seen without the gray mat tile had a significantly reduced detection rate.
In POWERPLAY, the white sticker background is always present, except the white color of the background can be unintentionally altered based on the lighting being used in the room; warmer lights cause the white to turn yellow or orange, cooler lights cause the white to turn more blue, and glare causes a gradient of colors to appear across the white background. Sometimes algorithms can adjust the color scheme to provide a “white balance” to adjust the colors correctly, but requiring such tools and adjustments might be beyond the grasp for the average user. (See White Balance Control and White Balance Control Mode for more information about adjusting white balance programmatically within the SDK’s Java language libraries).
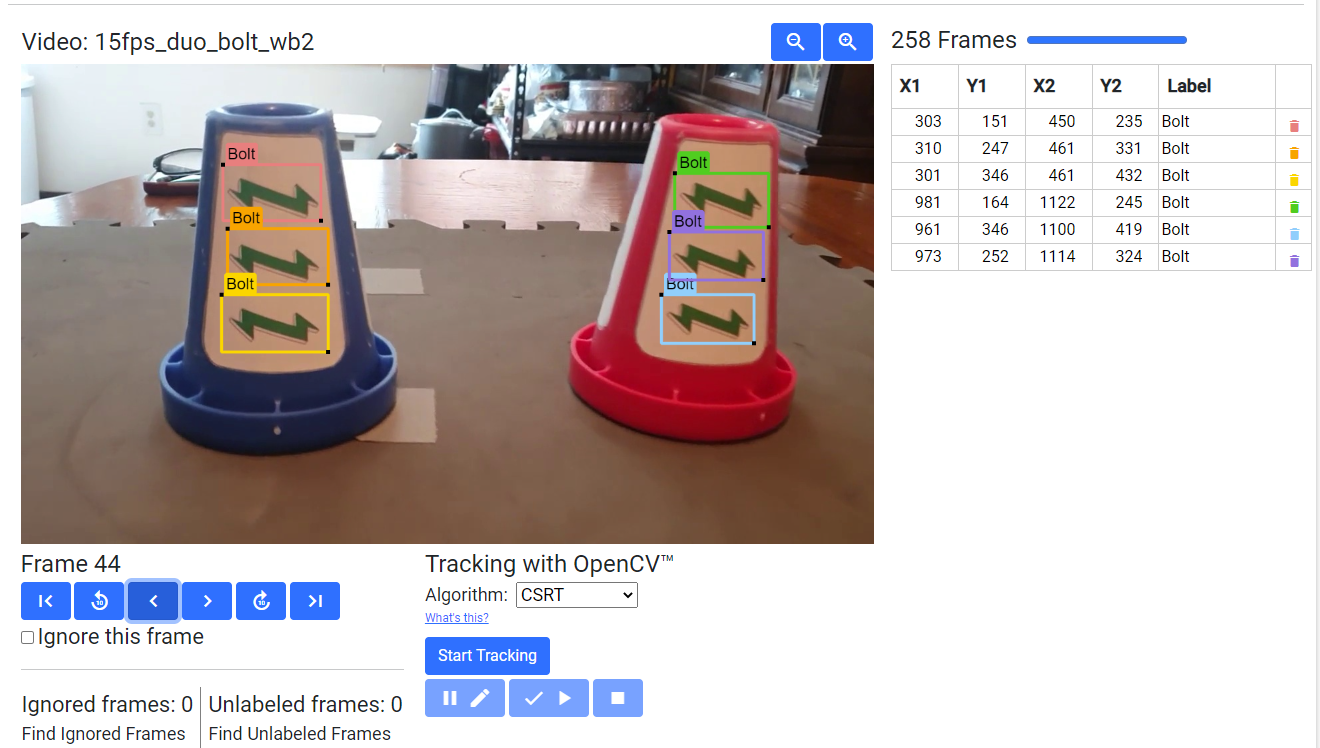
In order to get TensorFlow to become less sensitive to the need for “white balance” within the frame, and ignore the white altogether, a suite of different lighting scenarios were replicated and used to train the model with the hopes that TensorFlow would eventually see the “areas of changing colors” (due to the different lighting situations) as background and ignore it altogether to focus more on the images themselves. This is ultimately what was successful for the default model. Below are some examples of the lighting conditions used to train the model.
Lighting Scenario 1
Lighting Scenario 2
Lighting Scenario 3

It is recommended that teams choose a background that is more resistant to being “altered” by lighting conditions, and doesn’t exist anywhere else on the game field, or try adjusting the White Balance Control via programming if you’re a Java language user.
Selecting Images For Signal Sleeves
Selecting images to use for your custom Signal Sleeve can seem daunting. Questions swirl like “What images are going to be recognized best?”, “Why were the images used in the Default Model chosen?”, and “How do I make this easier on myself?”. Hopefully this section will help you understand the image selection used for the Default Model, and that will help inform your own decisions for your Signal Sleeve.
First, it’s important to note that TensorFlow has the following quirks/behaviors:
In order to run TensorFlow on mobile phones, FIRST Tech Challenge uses a very small core model resolution. This means the image is downscaled from the high definition webcam image to one that is only 300x300 pixels. This means that medium and small objects within the webcam images may be reduced to very small indistinguishable clusters of pixels in the target image. Keep the objects in the view of the camera large, and train for a wide range of image sizes.
TensorFlow is not really good at differentiating geometric shapes. TensorFlow Object Detection is an object classifier, and similar geometric shapes will classify similarly. Humans are much better at differentiating geometric shapes than neural net algorithms, like TensorFlow, at the present.
TensorFlow is great at pattern detection, color differentiation, and image textures. For instance, TensorFlow can be easily trained to recognize the difference between Zebras and Horses, but it would not be able to differentiate between specific Zebra patterns to be able to identify, for example, “Carl the Zebra.”
The default images were chosen for several design factors:
Images needed to be vertically short and horizontally long. When setting the TensorFlow zoom factor above 1.0, the aspect ratio causes the zoom window to be wider horizontally than vertically; even at modest zoom factors the zoom window shrinks to be vertically smaller than the sticker itself at even the minimim distance from the robot (18 inches). In order to have more than one detection within the window, and to aid in providing wide margins for adjusting the camera during robot setup, images that are horizontally wide and vertically short were desired. Thanks to the season theme, the green lightning bolt from the FIRST Energize season logo was chosen first. The green color and the zig-zag pattern on the top and bottom of the bolt were desired elements for TensorFlow.
TensorFlow’s ability to detect patterns better than shapes was utilized in two ways in the “Bulb” image; first the repeated bulb image created a repeating pattern that TensorFlow could recognize, and the image itself was colored differently than other colors it may have seen on the sticker background, the cones themselves, or on the green lightning bolt. Yellow was selected as the color within the repeating light bulbs. It helped that the light bulb had a similar art style to the lightning bolt and even fit the theme, even though that wasn’t a hard requirement.
Finally, the solar panels were selected similarly to the bulbs. The grid pattern within the solar panels made for a unique pattern element not present in the other images, and the purple color helped offset it as well.
With the images selected, there were only basic tweaks made to the images for use in POWERPLAY. For example, the images were modified to have relatively similar aspect ratios and sizes to aid in uniformity of setup, and it was determined that TensorFlow could be trained to recognize elements of each image fairly well.
When selecting images for use with TensorFlow, keep in mind the elements of pattern, color, and size. For example, a donut can be a great image for use by TensorFlow; not because of the circular shape, but because of the frosting and the sprinkles on top which creates a very unique pattern for TensorFlow to recognize. Be creative!